Apakah pengawal logik boleh atur cara
Pengawal (dari English Control) — kawalan. Pengawal dalam sistem automatik ialah alat teknikal yang melaksanakan fungsi mengawal proses fizikal mengikut algoritma yang ditetapkan, menggunakan maklumat yang diterima daripada penderia dan dipaparkan pada peranti akhir. Mana-mana peranti yang boleh beroperasi secara automatik termasuk pengawal kawalan — modul yang mentakrifkan logik operasi peranti.
Pengawal Logik Boleh Aturcara (PLC) — cara teknikal yang digunakan untuk mengautomasikan proses teknologi. Ia adalah peranti khusus elektronik yang berfungsi dalam masa nyata.
PLC boleh diprogramkan secara digital dan dengan itu sangat mudah disesuaikan dengan keperluan proses tertentu. Dengan permintaan yang semakin meningkat pada mesin moden dan proses pengeluaran, penyelesaian automasi PLC telah menjadi bahagian penting dalam pengeluaran perindustrian harian.
Mod operasi utama PLC ialah penggunaan autonomi jangka panjangnya, selalunya dalam keadaan persekitaran yang buruk, tanpa penyelenggaraan utama dan tanpa campur tangan manusia.PLC biasanya digunakan untuk mengawal proses berjujukan, menggunakan input dan output untuk menentukan keadaan objek dan mengeluarkan tindakan kawalan.

Pengawal logik boleh atur cara adalah sesuai untuk kawalan individu bagi pelbagai aplikasi, mesin, sistem dan proses atau pengurusan kuasa digital.
Pengawal logik boleh atur cara ialah peranti mikropemproses yang direka untuk mengumpul, menukar, memproses, menyimpan maklumat dan menjana arahan kawalan, mempunyai bilangan input dan output yang terhingga, penderia, suis, penggerak yang disambungkan kepadanya ke objek kawalan, dan direka bentuk untuk beroperasi dalam mod masa nyata.

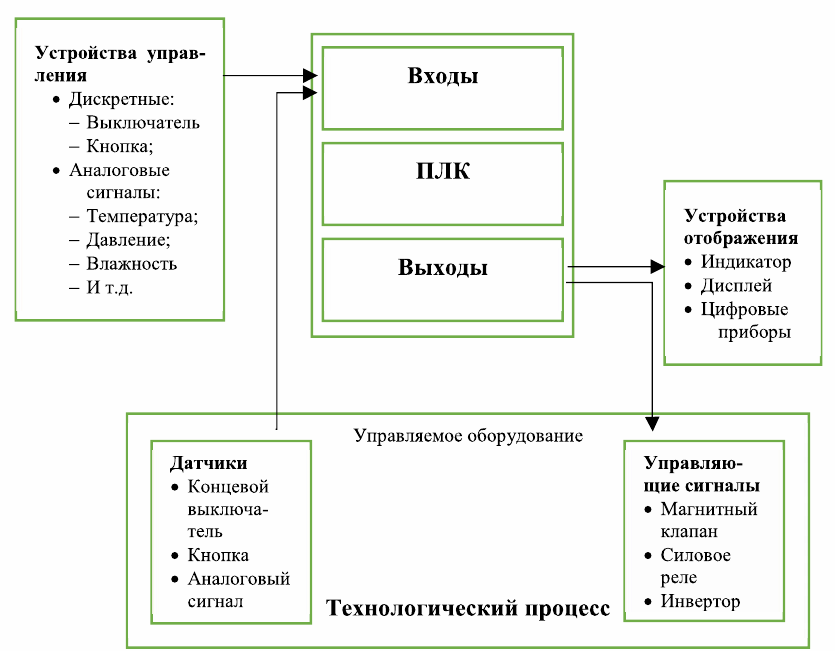
PLC biasa terdiri daripada bahagian berikut:
- Contohnya, butang, penghalang cahaya atau penderia suhu disambungkan ke unit kawalan melalui input. Terima kasih kepada komponen ini, sistem PLC boleh memantau keadaan semasa mesin.
- Output disambungkan kepada peranti seperti motor elektrik, injap hidraulik yang digunakan oleh PLC untuk mengawal mesin tertentu.
- Program pengguna — perisian PLC, menyediakan penukaran output bergantung pada pengaktifan input.
- Antara muka komunikasi digunakan untuk menyambungkan PLC ke sistem lain.
- PLC juga termasuk bekalan kuasa sendiri, CPU dan bas dalaman.
Sistem kawalan hubungan geganti yang digunakan pada masa ini dicirikan oleh kebolehpercayaan yang rendah, kehadiran kenalan terbuka, dsb. Penggunaan pengawal logik boleh atur cara (PLC) untuk automasi sistem kawalan tempatan adalah yang paling berkesan.
Dari masa ke masa, PLC terus berkembang dan menyesuaikan diri dengan keperluan khusus dalam persekitaran perindustrian.Fungsi PLC mempunyai beberapa kelebihan: kerana fleksibiliti mereka, ia boleh digunakan dalam pelbagai jenis industri. Tetapan boleh ditukar pada bila-bila masa tanpa mengganggu operasi peralatan itu sendiri.
Hanya peranti boleh atur cara secara individu untuk kawalan, pemantauan dan pengawalseliaan prestasi mesin pengeluaran boleh memenuhi keperluan tinggi industri moden.
PLC biasanya boleh dipasang terus pada mesin pengeluaran. Ini menjimatkan ruang yang diperlukan. Selain dapat mengawal PLC dari jauh, salah satu kelebihan terbesarnya ialah keupayaan komunikasinya.
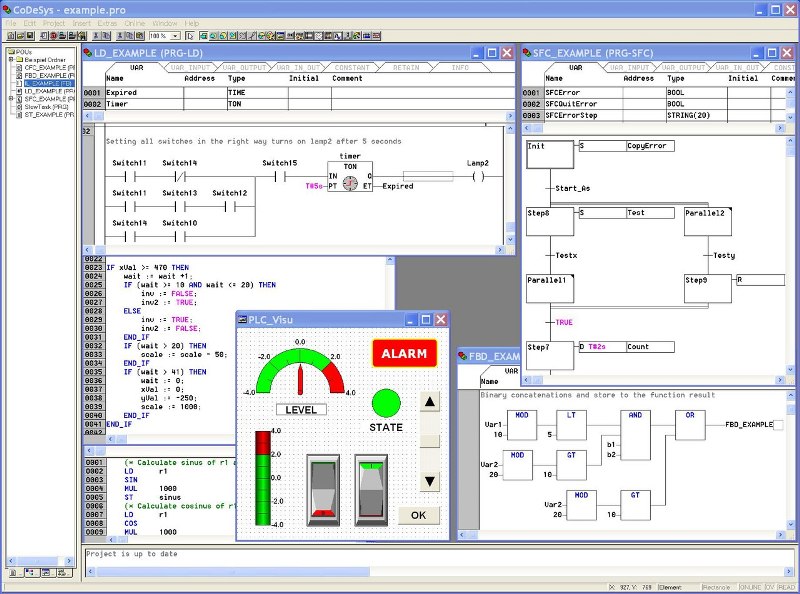
PLC diprogramkan mengikut piawaian IEC-61131-3. PLC diprogramkan dengan bantuan kompleks khusus, salah satu yang paling popular ialah CoDeSys. Ia termasuk bahasa berikut: grafik (rajah bar, rajah blok fungsi, rajah fungsi berjujukan, rajah fungsi berterusan), teks (senarai arahan, teks berstruktur).

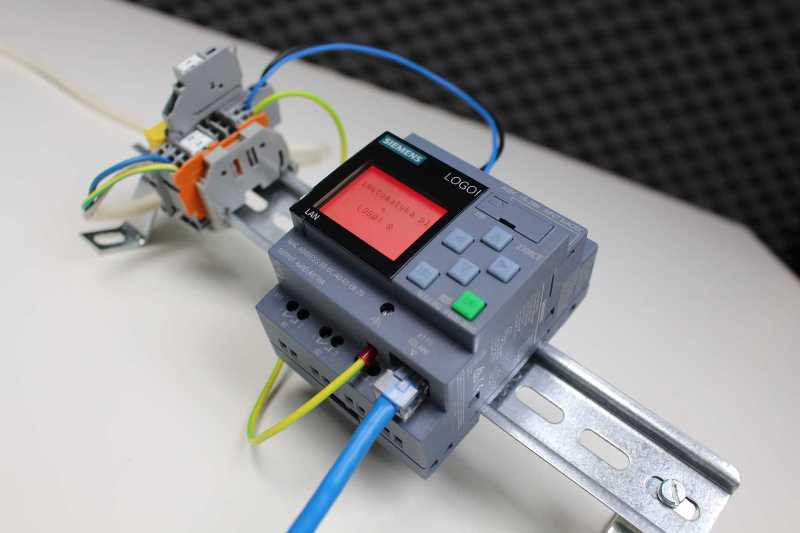
Pengawal logik boleh atur cara pertama di dunia muncul pada pertengahan abad ke-20. Modicon 084 adalah kabinet dengan satu set geganti dan kenalan yang saling berkaitan, memorinya hanya 4 kilobait. Istilah PLC telah dicipta oleh Allen-Bradley pada tahun 1971. Bersama Richard Morley, beliau ialah «bapa PLC».
Sistem pertama ini dikaitkan dengan dua juruteknik, Richard E. Morley dan Odo J. Strugger. Semasa Morley memperkenalkan sistem Modicon 084 beliau sebagai "komputer semikonduktor semikonduktor" pada tahun 1969, Odo J. Struger membantu membangunkan PLC untuk Allen-Bradley yang berpangkalan di Wisconsin. Kedua-dua jurutera dianggap sebagai pencipta pengawal logik boleh atur cara (PLC) pertama.Dari masa ke masa, permintaan terhadap persekitaran pengeluaran di seluruh dunia telah berkembang. Oleh itu PLC berkembang dan dimasukkan ke dalam perkhidmatan dalam banyak versi.
— Jurutera elektrik Yakov Kuznetsov
Struktur pengawal logik boleh atur cara:
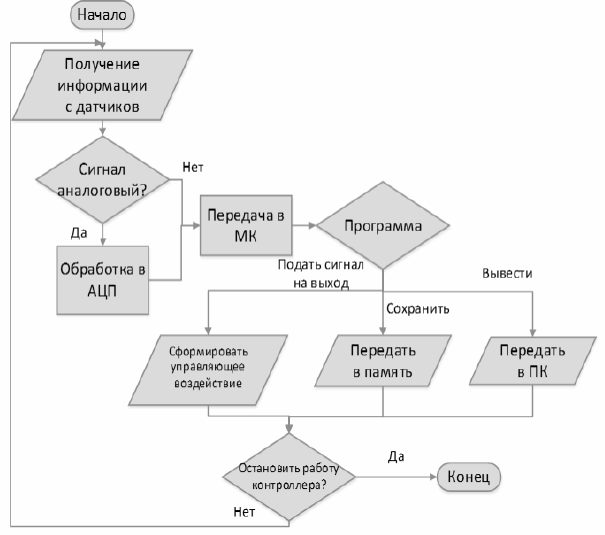
Algoritma kerja PLC:
Mod operasi utama PLC ialah penggunaan autonomi jangka panjangnya, selalunya dalam keadaan persekitaran yang buruk, tanpa penyelenggaraan utama dan secara praktikal tanpa campur tangan manusia.

PLC mempunyai beberapa ciri yang membezakannya daripada peranti elektronik lain yang digunakan dalam kejuruteraan mekanikal:
-
Tidak seperti mikropengawal (komputer cip tunggal)—litar mikro yang direka untuk mengawal peranti elektronik—PLC biasanya digunakan dalam proses pengeluaran industri automatik dalam konteks kilang pembuatan;
-
tidak seperti komputer, PLC tertumpu pada bekerja dengan unit mesin melalui input canggih isyarat deria dan output isyarat kepada penggerak, tertumpu pada membuat keputusan dan kawalan pengendali;
-
Tidak seperti sistem terbenam, PLC dihasilkan sebagai produk bebas, berasingan daripada peralatan yang dikawalnya.
-
kehadiran bilangan operasi logik yang diperluaskan dan keupayaan untuk menetapkan pemasa dan pembilang.
-
Semua bahasa pengaturcaraan PLC mempunyai akses mudah kepada manipulasi bit dalam perkataan mesin, tidak seperti kebanyakan bahasa pengaturcaraan peringkat tinggi pada komputer moden.
Terdapat PLC dengan tahap kerumitan yang berbeza, bergantung pada kerumitan tugas automasi yang perlu diselesaikan.
Operasi asas PLC sepadan dengan kawalan gabungan litar logik unit tertentu - mekanikal, elektrik, hidraulik, pneumatik dan elektronik.
Dalam proses kawalan, pengawal menjana isyarat keluaran (hidup — mati) untuk mengawal penggerak (motor elektrik, injap, solenoid dan injap) berdasarkan hasil isyarat pemprosesan yang diterima daripada penderia atau peranti peringkat lebih tinggi.
Pengawal boleh atur cara moden juga melakukan operasi lain, seperti menggabungkan fungsi pembilang dan pemasa selang waktu, dan mengendalikan kelewatan isyarat.
Pengawal logik boleh atur cara peringkat pertengahan dan tinggi biasanya mempunyai perkakasan dan perisian kawalan gerakan terbina dalam, terutamanya modul kaunter berkelajuan tinggi, modul penentududukan, dsb., yang membolehkan pelaksanaan fungsi kawalan gerakan yang agak mudah dan menyediakan kedudukan ketepatan tinggi.
Dari segi struktur, PLC disesuaikan untuk beroperasi dalam keadaan perindustrian biasa, dengan mengambil kira atmosfera yang tercemar, tahap isyarat, rintangan haba dan lembapan, bekalan kuasa yang tidak boleh dipercayai, serta kejutan dan getaran mekanikal. Untuk tujuan ini, bahagian perkakasan disertakan dalam perumahan yang teguh yang meminimumkan kesan negatif beberapa faktor pengeluaran.

Perbezaan utama antara litar kawalan PLC dan geganti ialah algoritma yang dilaksanakan menggunakan program. Satu pengawal boleh melaksanakan litar bersamaan dengan beribu-ribu elemen logik keras. Selain itu, kebolehpercayaan litar tidak bergantung pada kerumitannya.
Pengawal logik boleh atur cara secara tradisinya beroperasi di bahagian bawah sistem kawalan loji automatik (ACS)—sistem yang berkaitan secara langsung dengan teknologi pembuatan.
PLC biasanya merupakan langkah pertama dalam membina sistem kawalan. Ini kerana keperluan untuk mengautomasikan mesin atau loji sentiasa menjadi yang paling jelas. Ia memberikan kesan ekonomi yang cepat, meningkatkan kualiti pengeluaran, mengelakkan kerja-kerja rutin dan menuntut fizikal. PLC mengikut definisi dibina untuk kerja ini.
Kelebihan utama PLC ialah mekanisme kecil boleh menggantikan sejumlah besar geganti elektromekanikal, serta masa imbasan pantas, sistem I / O padat, alat pengaturcaraan piawai dan antara muka khas yang membolehkan sambungan peranti automasi bukan standard terus ke pengawal atau menggabungkan peralatan yang berbeza ke dalam satu sistem kawalan.
Bagaimana untuk memilih PLC yang betul
Memilih pengawal boleh atur cara adalah tugas penting dan sukar apabila mencipta sistem untuk kawalan automatik parameter teknologi dalam mana-mana perusahaan perindustrian.
Apabila memilihnya, perlu mengambil kira dan menilai sejumlah besar faktor. Dengan menggabungkan keperluan teknologi untuk objek khusus untuk kawalan automatik dengan analisis perbandingan pengawal logik boleh atur cara moden, anda boleh membuat keputusan yang tepat.
Klasifikasi PLC:
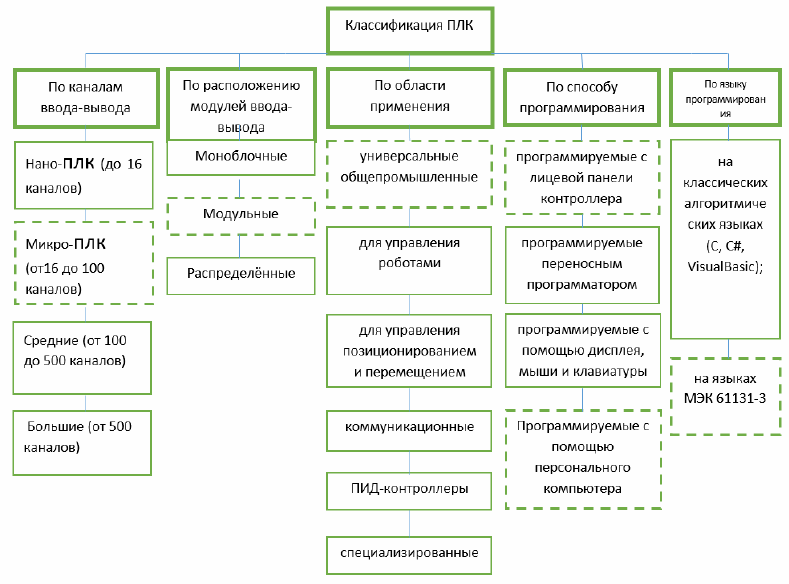
Apabila membeli PLC, langkah pertama ialah mempertimbangkan dengan teliti jenis yang sesuai untuk tujuan tersebut.
PLC klasik ialah modul yang biasanya boleh diprogramkan menggunakan komputer. Selepas itu, komputer tidak lagi diperlukan untuk mengendalikan PLC itu sendiri.Pada dasarnya, perbezaan mesti dibuat antara PLC modular, padat dan berslot.
PLC padat biasanya lebih murah dan menggunakan lebih sedikit ruang. Selepas itu, ia digunakan terutamanya untuk proses automasi kecil.
Selain aplikasi berdasarkan platform PC, terdapat juga PLC kompak yang boleh diprogramkan daripada panel kawalan tanpa PC.
PLC modular menawarkan keupayaan untuk memasang unit kawalan secara fleksibel daripada modul individu supaya tugas automatik yang lebih kompleks boleh diprogramkan.
Terdapat modul yang boleh dilaksanakan dalam sistem sebagai kad pemalam dalam slot percuma pada papan induk.
Ia juga perlu untuk membezakan antara PLC dalam cara mereka melakukan kerja mereka. Selain model yang mengawal input dalam kitaran yang telah ditetapkan dan PLC yang memproses output pada pelbagai peringkat, model PLC dipacu peristiwa juga tersedia.
Sebelum membeli PLC, anda harus memberi perhatian khusus kepada bilangan input dan output.Selain itu, perlu mempertimbangkan parameter lain yang tidak diambil kira semasa perancangan awal. Juga pertimbangkan sama ada anda memerlukan PLC dengan paparan bersepadu dan panel sentuh. Dalam sesetengah kes, membaca nilai dan mengurus sistem melalui infrastruktur IT sedia ada mungkin mencukupi.
Apa itu HMI
HMI (Antara Muka Mesin Manusia) — antara muka komunikasi manusia-mesin. Antara muka intuitif dan mesra pengguna ini digunakan untuk membolehkan pengguna mengendalikan dan mengendalikan mesin tanpa pengetahuan yang mendalam tentang pengaturcaraan PLC. Satu jenis peranti HMI ialah sistem SCADA: Pemerolehan data dan sistem kawalan operasi (sistem SCADA)