Pemacu elektrik mesin pelarik
 Untuk mendapatkan kelajuan pemotongan yang menguntungkan pada mesin pelarik, anda perlu mempunyai variasi dalam julat 80: 1 hingga 100: 1. Dalam kes ini, adalah wajar perubahan itu selancar mungkin untuk memastikan kelajuan pemotongan yang paling menguntungkan dalam semua kes.
Untuk mendapatkan kelajuan pemotongan yang menguntungkan pada mesin pelarik, anda perlu mempunyai variasi dalam julat 80: 1 hingga 100: 1. Dalam kes ini, adalah wajar perubahan itu selancar mungkin untuk memastikan kelajuan pemotongan yang paling menguntungkan dalam semua kes.
Julat kawalan dipanggil nisbah kelajuan sudut maksimum (atau kekerapan putaran) kepada minimum, dan untuk mesin dengan gerakan translasi, nisbah maksimum kepada kelajuan linear minimum.
Untuk kumpulan pelarik di mana gerakan utama adalah berputar, ia biasanya memerlukan ketekalan kuasa ke atas kebanyakan julat kelajuan, dan hanya dalam julat kelajuan rendah — ketekalan momen sama dengan maksimum yang dibenarkan mengikut mekanisme pergerakan keadaan kekuatan utama. Kelajuan putaran rendah bertujuan untuk jenis pemprosesan tertentu: pemangkasan, pusingan jahitan yang dikimpal, dsb.
Peranti pelarik:
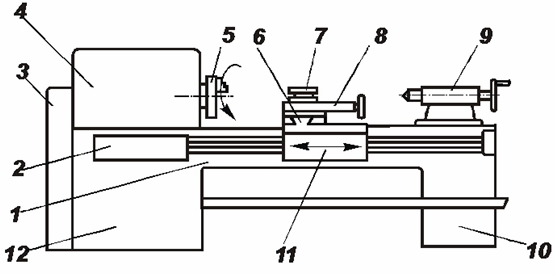 Unit utama mesin pelarik: 1 - katil; 2 — kotak bekalan kuasa; 3 — gitar dengan gear yang boleh diganti; 4 — penggali dengan kotak gear dan gelendong; chuck pemusatan kendiri 5 rahang; 6 - sokongan membujur; 7 - pemegang untuk alatan; 8 - pengangkutan melintang; 9 - ekor; 10 - alas belakang; 11 - apron; 12 — alas hadapan Nod dan mekanisme pelarik pemotong skru:
Unit utama mesin pelarik: 1 - katil; 2 — kotak bekalan kuasa; 3 — gitar dengan gear yang boleh diganti; 4 — penggali dengan kotak gear dan gelendong; chuck pemusatan kendiri 5 rahang; 6 - sokongan membujur; 7 - pemegang untuk alatan; 8 - pengangkutan melintang; 9 - ekor; 10 - alas belakang; 11 - apron; 12 — alas hadapan Nod dan mekanisme pelarik pemotong skru:
Pemacu utama V pada mesin pelarik dan penggerudian untuk pelbagai aplikasi, kecil dan sederhana, jenis pemacu utama ialah motor sangkar tupai aruhan.
Enjin tak segerak berstruktur digabungkan dengan kotak gear mesin, boleh dipercayai dalam operasi dan tidak memerlukan penyelenggaraan khas.
Pada pelarik dengan kelajuan gelendong malar, dengan perubahan dalam diameter pemesinan drev, kelajuan pemotongan akan berubah, m / min: vz = π x drev x nsp / 1000 Oleh itu, kelajuan gelendong mesin ditentukan oleh dua faktor — diameter do6p dan kelajuan pemotongan vz. Penggunaan rasional mesin memerlukan perubahan dalam kelajuan gelendong apabila faktor teknologi berubah.

Untuk penggunaan alat pemotong dan mesin yang paling lengkap, pemprosesan produk hendaklah dijalankan pada kelajuan pemotongan yang dipanggil berdaya maju (optimum) secara ekonomi, yang, apabila mesin beroperasi dengan suapan dan kedalaman pemotongan yang sesuai, hendaklah memastikan pemprosesan bahan kerja dengan ketepatan yang diperlukan dan kebersihan permukaan pada kos pemesinan unit yang dikurangkan paling rendah, produktiviti akan menjadi lebih rendah sedikit daripada yang tertinggi mungkin.

Pada mesin pelarik kecil, memulakan, memberhentikan dan menterbalikkan arah putaran gelendong sering dilakukan menggunakan cengkaman geseran. Motor kekal disambungkan ke sesalur kuasa dan berputar dalam satu arah.
Untuk pemacu utama beberapa mesin pelarik, motor tak segerak berbilang kelajuan digunakan. Penggunaan pemacu sedemikian disyorkan jika ia menyebabkan memudahkan kotak gear atau apabila perlu menukar kelajuan gelendong dengan cepat. …
 Pelarik untuk tugas berat dan pelarik menegak umumnya mempunyai kawalan kelajuan tanpa langkah elektromekanikal bagi pemacu utama menggunakan motor DC.
Pelarik untuk tugas berat dan pelarik menegak umumnya mempunyai kawalan kelajuan tanpa langkah elektromekanikal bagi pemacu utama menggunakan motor DC.
Kotak gear yang agak mudah bagi mesin sedemikian memberikan dua hingga tiga langkah kelajuan sudut, dan dalam selang antara dua langkah ia dijalankan dalam julat (3 — 5): 1 pelarasan lancar kelajuan sudut motor dengan menukar magnetnya. kelajuan fluks. Ini, khususnya, memungkinkan untuk mengekalkan kelajuan pemotongan yang berterusan apabila memusing permukaan hujung dan kon.
Kelancaran peraturan ditentukan oleh nisbah kelajuan dalam dua bahagian kawalan bersebelahan.Kelancaran kawalan memberi kesan ketara kepada prestasi mesin, kerana kelajuan pemotongan optimum bergantung pada kekerasan bahan bahan kerja, sifat bahan dan geometri alat pemotong, serta sifat bahan kerja. pemprosesan. Bahagian dengan saiz yang berbeza, bahan yang berbeza dan alat yang berbeza boleh diproses pada mesin yang sama, yang merupakan sebab untuk mengubah keadaan pemotongan.
Ciri mesin pemusing dan penggerudian pemacu elektrik mempunyai momen daya geseran yang besar pada permulaan permulaan (sehingga 0.8 Mnom) dan momen inersia ketara plat muka dengan bahagian yang melebihi momen inersia pemutar motor elektrik sebanyak 8 — 9 kali pada kelajuan mekanikal yang tinggi. Penggunaan pemacu DC dalam kes ini memberikan permulaan yang lancar dengan pecutan berterusan.
Di kedai-kedai loji pembinaan mesin, biasanya tiada rangkaian arus terus, oleh itu, untuk menggerakkan enjin mesin pemotong logam berat, penukar berasingan dipasang: mesin elektrik (sistem G -D) atau statik (sistem TP -D ).
Kawalan kelajuan elektrik tanpa langkah (dua zon) digunakan dalam automasi mesin dengan kitaran tugas yang kompleks, yang memudahkan untuk melaraskannya kepada sebarang kelajuan pemotongan (contohnya, beberapa mesin pelarik automatik untuk mesin pelarik).

Peranti untuk memberi makan pelarik bersaiz kecil dan sederhana paling kerap dilakukan oleh enjin utama, yang memberikan kemungkinan threading. Untuk melaraskan kadar suapan, kotak suapan berbilang peringkat digunakan. Gear dialihkan secara manual atau menggunakan cengkaman geseran elektromagnet (dari jauh).
Beberapa mesin pelarik moden dan mesin bor menggunakan pemacu DC yang berasingan dengan kawalan lebar untuk penyuap. Halaju sudut motor berbeza dalam julat sehingga (100 — 200): 1 atau lebih. Pemanduan dijalankan mengikut sistem EMU — D, PMU — D atau TP — D.
Untuk pemacu tambahan untuk pelarik (pergerakan gerabak dipercepat, pengapit produk, pam penyejuk, dll.), motor sangkar tupai tak segerak yang berasingan digunakan.
hidup. mesin bubut moden, mesin putar dan mesin putar digunakan secara meluas untuk mengautomasikan pergerakan tambahan serta mengawal mekanisme mesin dari jauh.
Pemacu elektrik mesin bubut pemotong skru 1K62
Pemacu gelendong dan bekalan kuasa kerja sokongan dijalankan oleh motor sangkar tupai tak segerak dengan kuasa 10 kW. Kelajuan sudut gelendong dikawal dengan menukar gear kotak gear menggunakan pemegang, menukar suapan membujur dan melintang angkup. — mengalihkan gear kotak gear juga menggunakan pemegang yang sepadan.
Motor tak segerak 1.0 kW yang berasingan digunakan untuk pergerakan slaid pantas. Menghidupkan dan mematikan gelendong mesin, serta pembalikannya, dilakukan menggunakan klac geseran berbilang lapisan, yang dikawal oleh dua pemegang.Suapan mekanikal caliper dalam setiap arah disambungkan dengan pemegang tunggal.
Pelarik turet dengan pemacu elektrik 1P365
Ciri memusing pelarik ialah pensuisan kelajuan automatik dan suapan gelendong tanpa menghentikan mesin, yang dijalankan dengan bantuan gandingan elektromagnet yang dibina ke dalam kotak gear dan kotak suapan.
Pemacu gelendong mesin bubut 1P365 dijalankan oleh motor tak segerak dengan kuasa 14 kW, motor kedua dengan kuasa 1.7 kW memacu pam sistem hidraulik dan juga digunakan untuk mencapai pergerakan membujur pesat dua mesin menyokong. Mesin ini juga mempunyai pam penyejuk dengan kuasa 0.125 kW.
Kelajuan sudut gelendong boleh laras dalam langkah dari 3.4 hingga 150 rad / s. Pergerakan unit gear dalam kotak gear dijalankan oleh silinder hidraulik. Kotak gear juga mengandungi klac yang terdiri daripada dua klac: satu untuk menggerakkan putaran hadapan (kanan) gelendong dan satu lagi untuk menggerakkan putaran belakang (kiri). Pengaktifan klac ini dijalankan oleh silinder hidraulik, yang takalnya diterjemahkan dengan sewajarnya dengan bantuan elektromagnet. Gandingan menyambungkan aci motor gelendong ke kotak gear.
Untuk menghentikan gelendong dengan cepat, brek hidraulik disediakan di dalam kotak gear, yang dikawal oleh kili hidraulik khas dengan bantuan elektromagnet.
Supers dikuasakan oleh pemacu utama. Kadar suapan dilaraskan secara mekanikal dengan menukar blok gear dalam kotak suapan menggunakan silinder hidraulik.Penetapan putaran dan suapan yang diperlukan gelendong dilakukan dengan bantuan pemegang suis hidraulik yang terletak pada apron sokongan dan bertindak pada kili hidraulik silinder hidraulik yang sepadan.
Semua kawalan untuk pemacu elektrik mesin terletak pada panel yang terletak pada panel hadapan kotak gear.
Model 1565 Pemacu Elektrik Pelarik Membosankan
 Plat muka mesin menerima putaran daripada motor DC (Pnom = 70 kW, Unom = 440 V, nnom = 500 rpm, nmax = 1500 rpm) melalui transmisi tali pinggang V, kotak gear dua kelajuan dengan peralihan manual dan gear serong.
Plat muka mesin menerima putaran daripada motor DC (Pnom = 70 kW, Unom = 440 V, nnom = 500 rpm, nmax = 1500 rpm) melalui transmisi tali pinggang V, kotak gear dua kelajuan dengan peralihan manual dan gear serong.
Kelajuan putaran plat muka dikawal dalam julat 0.4 hingga 20.7 rpm. Kelajuan sudut motor elektrik boleh dilaraskan dengan menukar voltan angker dalam julat D = 5.7 dan arus pengujaan dalam julat d =3. Pemacu suapan — dari motor utama melalui kotak suapan — menyediakan 12 suapan dalam julat 0.2 hingga 16mm/rev.
Karusel mesin pelarik pemacu elektrik Thyristor ialah sistem tertutup untuk penstabilan kelajuan automatik dengan maklum balas negatif, dilaksanakan menggunakan tachogenerator.
Untuk mengurangkan masa berhenti plat muka dalam pelarik pusing, henti elektrik pemacu utama digunakan. Dalam kes ini, kekutuban voltan kawalan diubah dan motor dipindahkan ke mod operasi penjana.