Prinsip operasi penukar frekuensi dan kriteria pemilihannya untuk pengguna
 Penerangan ringkas tentang tujuan, prinsip operasi dan kriteria untuk memilih penukar frekuensi sebagai peranti kawalan untuk motor elektrik tak segerak.
Penerangan ringkas tentang tujuan, prinsip operasi dan kriteria untuk memilih penukar frekuensi sebagai peranti kawalan untuk motor elektrik tak segerak.
Motor aruhan sangkar tupai hari ini ia adalah peranti yang paling besar dan boleh dipercayai untuk mengawal pelbagai mesin dan mekanisme. Tetapi setiap pingat mempunyai sisi lain.
Dua kelemahan utama motor aruhan ialah kemustahilan mudah kawalan kelajuan rotor, arus permulaan yang sangat besar — lima, tujuh kali ganda nominal. Jika hanya peranti kawalan mekanikal digunakan, kelemahan ini membawa kepada kehilangan tenaga yang besar dan beban mekanikal kejutan. Ini mempunyai kesan yang sangat negatif terhadap hayat perkhidmatan peralatan.
Penukar frekuensi

Penukar frekuensi dengan kawalan lebar nadi (PE dengan PWM) mengurangkan arus masuk sebanyak 4-5 kali. Ia menyediakan permulaan motor aruhan yang lancar dan mengawal pemacu mengikut nisbah voltan / frekuensi yang diberikan.
Penukar frekuensi memberikan penjimatan tenaga sehingga 50%. Ia menjadi mungkin untuk membenarkan maklum balas antara peranti jiran, i.e. peralatan menyesuaikan diri untuk tugas dan mengubah keadaan operasi keseluruhan sistem.
Prinsip operasi penukar frekuensi
Penukar frekuensi PWM ialah penyongsang penukaran berganda… Mula-mula voltan sesalur 220 atau 380 V dibetulkan oleh jambatan diod input, kemudian ia dilicinkan dan ditapis menggunakan kapasitor.
Ini adalah peringkat pertama transformasi. Pada peringkat kedua, dari voltan malar, menggunakan litar mikro kawalan dan jambatan keluaran suis IGBT, jujukan PWM dengan kekerapan dan kitaran tugas tertentu terbentuk. Pada output penukar frekuensi, paket denyutan segi empat tepat dikeluarkan, tetapi disebabkan oleh kearuhan belitan stator motor aruhan, ia disepadukan dan akhirnya bertukar menjadi voltan yang dekat dengan sinusoid.
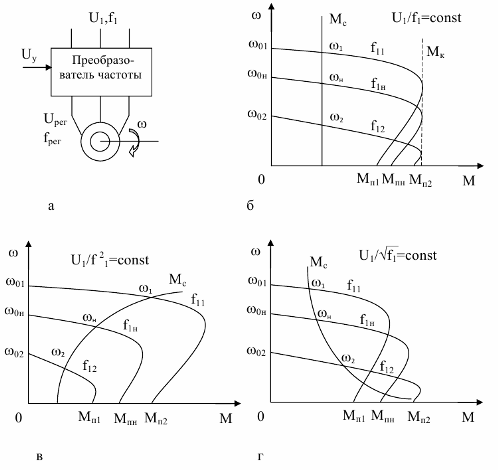 Ciri-ciri mekanikal motor elektrik tak segerak dengan peraturan kekerapan kelajuan: a — gambar rajah sambungan; b — ciri-ciri untuk beban dengan momen statik rintangan berterusan; c - ciri beban kipas; d - ciri tork beban statik, berkadar songsang dengan kelajuan sudut putaran.
Ciri-ciri mekanikal motor elektrik tak segerak dengan peraturan kekerapan kelajuan: a — gambar rajah sambungan; b — ciri-ciri untuk beban dengan momen statik rintangan berterusan; c - ciri beban kipas; d - ciri tork beban statik, berkadar songsang dengan kelajuan sudut putaran.
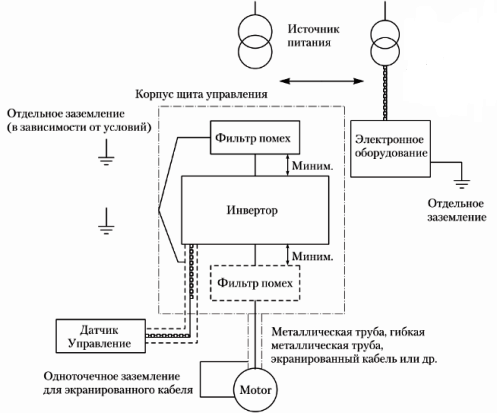 Litar biasa untuk menghidupkan penukar frekuensi
Litar biasa untuk menghidupkan penukar frekuensi 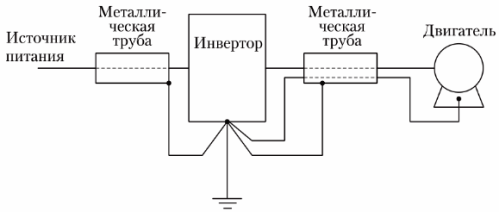 Contoh penyambungan talian kuasa (kabel) dalam litar penukar frekuensi
Contoh penyambungan talian kuasa (kabel) dalam litar penukar frekuensi
Kriteria untuk memilih penukar frekuensi

Dengan kaedah kawalan
Buang segera penukar yang tidak sesuai dari segi kuasa, jenis prestasi, kapasiti beban lampau, dsb. Mengikut jenis pengurusan yang anda perlu memutuskan apa yang hendak dipilih, kawalan skalar atau vektor.
Kebanyakan penukar frekuensi moden melaksanakan kawalan vektor, tetapi penukar frekuensi tersebut lebih mahal daripada penukar frekuensi skalar.
Kawalan vektor membolehkan kawalan yang lebih tepat dengan mengurangkan ralat statik. Mod skalar hanya menyokong nisbah malar antara voltan keluaran dan kekerapan keluaran, tetapi untuk peminat, sebagai contoh, ini cukup mencukupi.
Sejak penubuhannya, kawalan vektor telah menjadi strategi kawalan yang sangat popular untuk motor aruhan. Pada masa ini, kebanyakan penukar frekuensi melaksanakan kawalan vektor atau bahkan kawalan vektor tanpa sensor (trend ini ditemui dalam penukar frekuensi yang pada asalnya melaksanakan kawalan skalar dan tidak mempunyai terminal untuk menyambungkan penderia kelajuan).
Prinsip asas kawalan vektor terdiri daripada peraturan bebas berasingan bagi arus magnetik motor dan arus kuadratur, yang mana tork mekanikal aci adalah berkadar. Arus magnetisasi menentukan nilai pautan fluks sifar rotor dan dikekalkan malar.
Apabila kelajuan stabil, titik set arus kuadratur dijana menggunakan pengawal PI berasingan yang inputnya adalah percanggahan antara kelajuan motor yang dikehendaki dan diukur. Oleh itu, arus kuadratur sentiasa ditetapkan pada tahap minimum untuk memberikan tork mekanikal yang mencukupi untuk mengekalkan kelajuan yang ditetapkan. Oleh itu, kawalan vektor mempunyai kecekapan tenaga yang tinggi.
Melalui kuasa
Jika kuasa peralatan adalah lebih kurang sama, kemudian pilih penukar dari syarikat yang sama dengan kapasiti mengikut kuasa beban maksimum. Ini akan memastikan pertukaran dan memudahkan penyelenggaraan peralatan. Adalah disyorkan bahawa pusat perkhidmatan penukar frekuensi yang dipilih berada di bandar anda.
Melalui voltan sesalur
Sentiasa pilih penukar dengan julat voltan seluas mungkin, kedua-dua ke bawah dan ke atas. Hakikatnya ialah untuk rangkaian tempatan, perkataan standard hanya boleh membawa ketawa melalui air mata. Jika voltan rendah kemungkinan besar akan menyebabkan penukar frekuensi berhenti, maka voltan yang meningkat boleh menyebabkan kapasitor elektrolitik sesalur meletup dan input peranti gagal.
Mengikut julat pelarasan frekuensi

Dengan bilangan input kawalan
Input diskret diperlukan untuk memasukkan arahan kawalan (mula, henti, undur, henti, dsb.). Input analog diperlukan untuk isyarat maklum balas (penetapan dan penetapan pemacu semasa operasi). Input digital diperlukan untuk memasukkan isyarat frekuensi tinggi daripada penderia kelajuan dan kedudukan digital (pengekod). Bilangan input tidak boleh terlalu besar, tetapi lebih banyak input, lebih kompleks sistem boleh dibina dan lebih mahal.
Dengan bilangan isyarat keluaran
Output diskret digunakan untuk mengeluarkan isyarat untuk pelbagai peristiwa (penggera, terlalu panas, voltan input di atas atau di bawah paras, isyarat ralat, dsb.). Output analog digunakan untuk membina sistem maklum balas yang kompleks. Cadangan pemilihan adalah serupa dengan perenggan sebelumnya.
Bas kawalan
Peralatan yang anda gunakan untuk mengawal penukar frekuensi mesti mempunyai bas dan bilangan input / output yang sama seperti penukar frekuensi yang dipilih. Tinggalkan sedikit ruang untuk input dan output untuk peningkatan masa hadapan.
Dalam jaminan
Tempoh jaminan secara tidak langsung membolehkan anda menilai kebolehpercayaan penukar frekuensi. Sememangnya, anda harus memilih penukar frekuensi dengan rancangan jangka panjang.Sesetengah pengeluar menyediakan secara khusus untuk kes kerosakan yang tidak dilindungi oleh waranti. Sentiasa baca dokumentasi dengan teliti dan cari dalam talian untuk ulasan model dan pengeluar peralatan. Ini akan membantu anda membuat pilihan yang tepat. Jangan simpan wang untuk perkhidmatan berkualiti dan latihan kakitangan.
 Penukar frekuensi pada dirian
Penukar frekuensi pada dirian
Kapasiti beban berlebihan
Sebagai anggaran pertama, kuasa penukar frekuensi harus dipilih 10-15% lebih daripada kuasa motor. Arus penukar hendaklah lebih tinggi daripada arus undian motor dan lebih tinggi sedikit daripada arus beban yang mungkin.
Dalam perihalan mekanisme tertentu, arus beban lampau dan tempoh alirannya biasanya ditunjukkan. Baca dokumentasi! Ini akan membuatkan anda terhibur dan mungkin mengelakkan kerosakan peralatan pada masa hadapan. Jika pemacu juga dicirikan oleh beban kejutan (puncak) (beban selama 2-3 saat), maka perlu memilih penukar untuk arus puncak. Ambil margin 10% lagi.
Lihat juga mengenai topik ini: VLT AQUA Drive penukar frekuensi untuk unit pam