Pemacu elektrik boleh ubah sebagai cara penjimatan tenaga
 Peralihan daripada pemacu elektrik tidak terkawal kepada terkawal adalah salah satu cara utama untuk menjimatkan tenaga dalam pemacu elektrik dan dalam bidang teknologi melalui pemacu elektrik.
Peralihan daripada pemacu elektrik tidak terkawal kepada terkawal adalah salah satu cara utama untuk menjimatkan tenaga dalam pemacu elektrik dan dalam bidang teknologi melalui pemacu elektrik.
Sebagai peraturan, keperluan untuk mengawal kelajuan atau tork pemacu elektrik mekanisme pengeluaran ditentukan oleh keperluan proses teknologi. Sebagai contoh, kadar suapan pemotong menentukan kebersihan pemprosesan bahan kerja pada mesin pelarik, pengurangan kelajuan lif diperlukan untuk kedudukan tepat kereta sebelum berhenti, keperluan untuk melaraskan tork aci penggulungan ditentukan oleh syarat untuk mengekalkan daya ketegangan berterusan bahan yang cedera, dsb.
Walau bagaimanapun, terdapat beberapa mekanisme yang tidak memerlukan perubahan kelajuan mengikut keadaan teknologi, atau kaedah lain (bukan elektrik) untuk mempengaruhi parameter proses teknologi digunakan untuk peraturan.
Pertama sekali, mereka termasuk mekanisme pengangkutan berterusan untuk memindahkan produk pepejal, cecair dan gas: penghantar, kipas, kipas, unit pam. Untuk mekanisme ini, pada masa ini, sebagai peraturan, pemacu elektrik tak segerak yang tidak terkawal digunakan, yang menetapkan badan kerja bergerak pada kelajuan tetap, tanpa mengira beban pada mekanisme. Di bawah beban separanya, mod operasi pada kelajuan malar dicirikan oleh peningkatan penggunaan tenaga tertentu berbanding dengan mod nominal.
Pengurangan prestasi NSC, kecekapan penghantar berkurangan, kerana bahagian relatif kuasa yang digunakan mengatasi momen terbiar. Lebih menjimatkan ialah mod kelajuan berubah-ubah, yang memberikan prestasi yang sama, tetapi dengan komponen usaha menarik yang berterusan.
Dalam rajah. 1 menunjukkan pergantungan kuasa aci motor untuk penghantar dengan momen melahu Mx = 0, ЗМв untuk kelajuan malar (v — const) dan boleh laras (Fg = const) pergerakan beban. Kawasan berlorek dalam rajah mewakili penjimatan tenaga yang diperoleh melalui kawalan kelajuan.
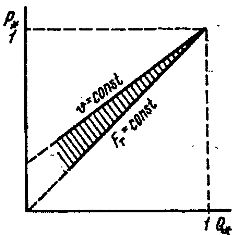
nasi. 1. Pergantungan kuasa aci motor elektrik pada prestasi penghantar
Jadi jika kelajuan penghantar dikurangkan kepada 60% daripada nilai nominal, maka kuasa aci motor akan berkurangan sebanyak 10% berbanding dengan nilai nominal. Kesan peraturan kelajuan adalah lebih tinggi, lebih besar tork terbiar, dan lebih ketara ia mengurangkan prestasi penghantar.
Mengurangkan kelajuan mekanisme pengangkutan berterusan dengan underloading membolehkan anda melakukan jumlah kerja yang diperlukan dengan penggunaan tenaga khusus yang lebih rendah, iaitu untuk menyelesaikan masalah ekonomi semata-mata untuk mengurangkan penggunaan tenaga dalam proses teknologi produk bergerak.
Biasanya, dengan pengurangan kelajuan mekanisme sedemikian, kesan ekonomi juga muncul disebabkan oleh peningkatan ciri-ciri operasi peralatan teknologi. Oleh itu, apabila kelajuan berkurangan, haus badan penghantar berkurangan, hayat perkhidmatan saluran paip dan kelengkapan meningkat disebabkan oleh penurunan tekanan yang dibangunkan oleh mesin untuk membekalkan cecair dan gas, dan penggunaan berlebihan produk ini juga dihapuskan.
Kesan dalam bidang teknologi sering menjadi jauh lebih tinggi daripada disebabkan oleh penjimatan tenaga, itulah sebabnya pada asasnya adalah salah untuk memutuskan kesesuaian menggunakan pemacu elektrik terkawal untuk mekanisme sedemikian dengan menilai hanya aspek tenaga.
Kawalan kelajuan mesin penyodok.
Mekanisme emparan untuk bekalan cecair dan gas (kipas, pam, kipas, pemampat) adalah mekanisme perindustrian am utama dengan potensi terbesar di seluruh negara untuk mengurangkan penggunaan tenaga khusus dengan ketara. Kedudukan istimewa mekanisme emparan dijelaskan oleh kebesarannya, kuasa tinggi, sebagai peraturan, dengan mod operasi yang panjang.
Keadaan ini menentukan bahagian penting mekanisme ini dalam imbangan tenaga negara.Jumlah kapasiti terpasang motor pemacu untuk pam, kipas dan pemampat adalah kira-kira 20% daripada kapasiti semua loji kuasa, manakala kipas sahaja menggunakan kira-kira 10% daripada semua tenaga elektrik yang dihasilkan di negara ini.
Sifat operasi mekanisme emparan dibentangkan dalam bentuk pergantungan kepala H pada kadar aliran Q dan kuasa P pada kadar aliran Q. Dalam mod operasi pegun, kepala yang dicipta oleh mekanisme emparan diseimbangkan oleh tekanan rangkaian hidro atau aerodinamik di mana ia menghantar cecair atau gas.
Komponen statik tekanan ditentukan untuk pam — dengan perbezaan geodesik antara paras pengguna dan pam; untuk peminat - tarikan semula jadi; untuk peminat dan pemampat — daripada tekanan gas termampat dalam rangkaian (takungan).
Titik persilangan Q-H-ciri pam dan rangkaian menentukan parameter H-Hn dan Q — Qn. Peraturan kadar aliran Q pam yang beroperasi pada kelajuan malar biasanya dilakukan oleh injap di alur keluar dan membawa kepada perubahan dalam ciri rangkaian, akibatnya kadar aliran QA * <1 sepadan dengan titik persilangan dengan ciri pam.
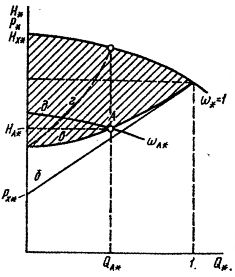
nasi. 2. Q-H-ciri unit pengepaman
Dengan analogi dengan litar elektrik, mengawal selia aliran melalui injap adalah serupa dengan mengawal arus dengan meningkatkan rintangan elektrik litar. Jelas sekali, kaedah kawalan ini tidak cekap dari sudut pandangan tenaga, kerana ia disertai dengan kehilangan tenaga yang tidak produktif dalam elemen pengawal selia (perintang, injap). Kehilangan injap dicirikan oleh kawasan berlorek dalam Rajah. 1.
Seperti dalam litar elektrik, adalah lebih menjimatkan untuk mengawal sumber tenaga berbanding penggunanya. Dalam kes ini, arus beban berkurangan dalam litar elektrik disebabkan oleh penurunan voltan sumber. Dalam rangkaian hidraulik dan aerodinamik, kesan yang sama diperoleh dengan mengurangkan tekanan yang dicipta oleh mekanisme, yang direalisasikan dengan mengurangkan kelajuan pendesaknya.
Apabila kelajuan berubah, ciri operasi mekanisme emparan berubah mengikut undang-undang persamaan, yang mempunyai bentuk: Q * = ω *, H * = ω *2, P * = ω *3
Kelajuan pendesak pam di mana cirinya akan melalui titik A:
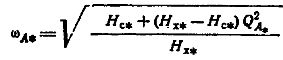
Ungkapan untuk kuasa yang digunakan oleh pam semasa peraturan kelajuan ialah:

Kebergantungan kuadratik momen pada kelajuan adalah ciri terutamanya untuk peminat, kerana komponen statik kepala yang ditentukan oleh tujahan semula jadi adalah lebih kecil daripada Hx. Dalam kesusasteraan teknikal, pergantungan anggaran masa pada kelajuan kadang-kadang digunakan, yang mengambil kira sifat mekanisme emparan ini:
M* = ω *n
di mana n = 2 pada pada Hc = 0 dan nHc> 0. Pengiraan dan eksperimen menunjukkan bahawa n=2 — 5, dan nilainya yang besar adalah ciri pemampat yang beroperasi dalam rangkaian dengan tekanan belakang yang ketara.
Analisis mod operasi pam pada kelajuan malar dan berubah-ubah menunjukkan bahawa penggunaan tenaga yang berlebihan pada ω= const ternyata sangat ketara. Sebagai contoh, hasil pengiraan mod operasi pam dengan parameter ditunjukkan di bawah Hx * = 1.2; Px*= 0.3 pada rangkaian dengan tekanan belakang yang berbeza Зс:
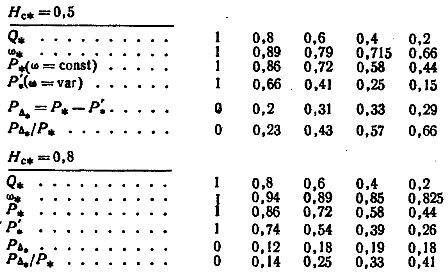
Data yang diberikan menunjukkan bahawa pemacu elektrik terkawal boleh mengurangkan penggunaan elektrik yang digunakan dengan ketara: sehingga 66% dalam kes pertama dan sehingga 41% dalam kes kedua. Dalam amalan, kesan ini boleh menjadi lebih tinggi, kerana atas pelbagai sebab (ketiadaan atau kerosakan injap, penggerak manual), peraturan oleh injap tidak digunakan sama sekali, yang membawa bukan sahaja kepada peningkatan penggunaan elektrik, tetapi juga kepada usaha dan kos yang berlebihan dalam rangkaian hidraulik.
Isu tenaga mekanisme emparan satu tindakan dalam rangkaian dengan parameter malar telah dibincangkan di atas. Dalam amalan, terdapat operasi selari mekanisme emparan dan rangkaian sering mempunyai parameter berubah-ubah. Sebagai contoh, rintangan aerodinamik rangkaian perlombongan berubah dengan perubahan dalam panjang dinding, rintangan hidrodinamik rangkaian bekalan air ditentukan oleh mod penggunaan air, yang berubah pada siang hari, dsb.
Dengan operasi selari mekanisme emparan, dua kes adalah mungkin:
1) kelajuan semua mekanisme dikawal secara serentak dan serentak;
2) kelajuan satu mekanisme atau sebahagian daripada mekanisme dikawal.
Jika parameter rangkaian adalah malar, maka dalam kes pertama semua mekanisme boleh dianggap sebagai satu setara yang mana semua hubungan di atas adalah sah. Dalam kes kedua, tekanan bahagian mekanisme yang tidak terkawal mempunyai kesan yang sama pada bahagian terkawal seperti tekanan belakang dan sangat penting, itulah sebabnya penjimatan elektrik di sini tidak melebihi 10-15% daripada kuasa nominal daripada mesin itu.
Parameter rangkaian boleh ubah sangat merumitkan analisis kerjasama mekanisme emparan dengan rangkaian. Dalam kes ini, kecekapan tenaga pemacu elektrik terkawal boleh ditentukan dalam bentuk kawasan yang sempadannya sepadan dengan nilai had parameter rangkaian dan kelajuan mekanisme emparan.
Lihat juga mengenai topik ini: VLT AQUA Drive penukar frekuensi untuk unit pam