Kawalan paras air tangki menggunakan geganti boleh atur cara OWEN PR110
Pengawal PR110 dihasilkan oleh syarikat Rusia «OWEN». Pengawal menjalankan operasi pada isyarat diskret sahaja — tujuan utamanya adalah untuk menggantikan sistem kawalan mudah berdasarkan logik geganti. Ini menentukan hakikat bahawa ia (serta pengawal lain dengan fungsi yang serupa) diberi nama «geganti boleh atur cara».

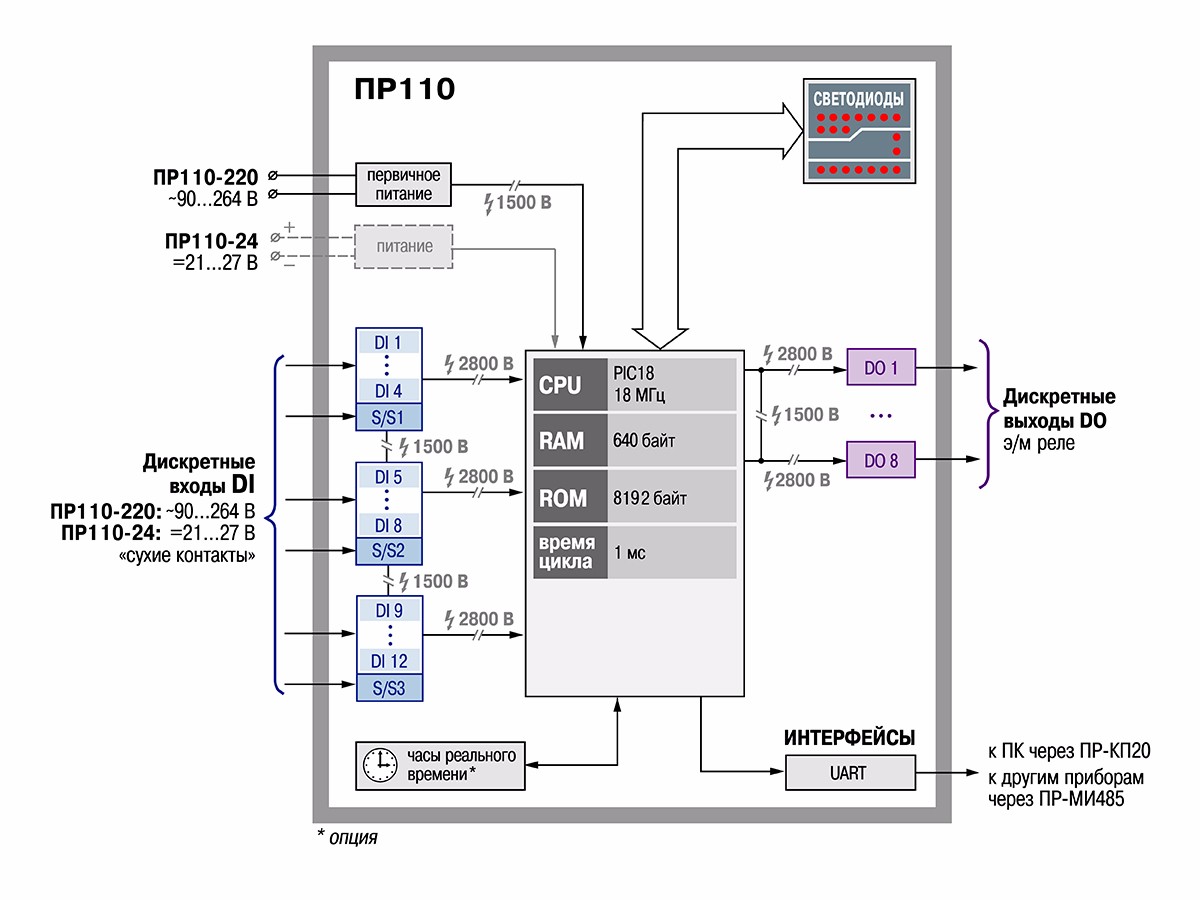
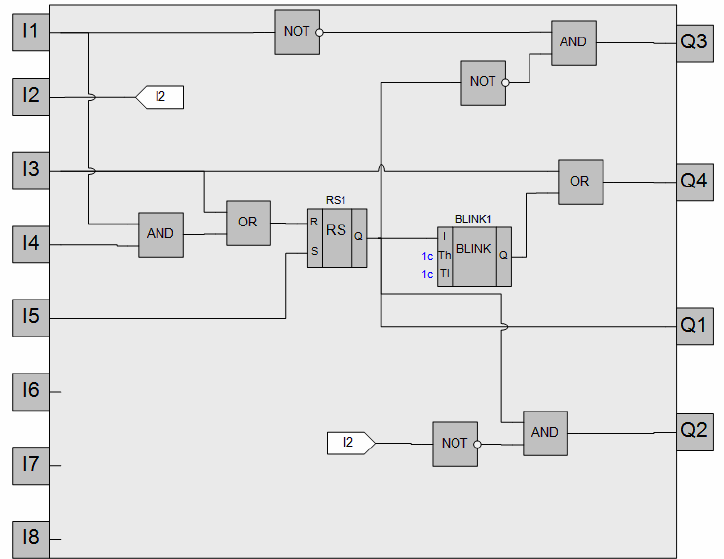
Gambarajah Fungsian Geganti Boleh Atur ARIES PR110:
Alat utama dan satu-satunya untuk pengaturcaraan dan penyahpepijatan perisian pengawal ialah komputer peribadi. Dengan bantuannya, anda bukan sahaja boleh mencipta perisian pengawal yang sepadan, tetapi, sebagai peraturan, juga memerhatikan cara ia berfungsi menggunakan simulasi komputer.

Kami akan melihat proses mencipta program kawalan pensuisan untuk geganti boleh atur cara PR110 menggunakan contoh sistem kawalan paras air dalam tangki.
Syarat teknikal
Ia adalah perlu untuk melaksanakan sistem kawalan untuk mengisi tangki dengan air. Prestasi fungsi tertentu ditentukan oleh keadaan penderia tahap, beberapa fungsi oleh pengendali. Perlu ada petunjuk terang tentang status sistem semasa.
Algoritma kawalan adalah seperti berikut. Terdapat tiga sensor yang menentukan paras air semasa dalam tangki: atas, tengah dan bawah. Setiap sensor dicetuskan (mengeluarkan tahap unit logik pada output) apabila air melebihi paras yang sepadan.
Kawalan manual dilakukan menggunakan dua butang: «Mula» dan «Berhenti». Apabila tangki kosong (paras air di bawah paras sensor yang lebih rendah), lampu penunjuk merah harus stabil, apabila ia penuh (di atas bahagian atas), ia harus hijau stabil. Dua pam dikawal.
Pam boleh dimulakan jika tangki tidak penuh (paras air di bawah bahagian atas). Jika dengan menekan butang «Mula» paras air berada di bawah paras purata - kedua-dua pam dimulakan, jika dengan menekan butang «Mula» paras air melebihi paras purata - satu pam dimulakan.
Menghidupkan pam disertakan dengan penunjuk hijau berkelip. Apabila tangki penuh (paras air mencapai paras atas), pam dimatikan secara automatik. Jika tangki kosong (paras air di bawah paras bawah), pam tidak boleh dimatikan dengan menekan butang «Berhenti».
Contoh mencipta program dalam Logik OWEN
Untuk melaksanakan tugas ini, mesin kawalan mesti mempunyai lima input diskret dan empat output geganti. Untuk menyelesaikan masalah ini, kami akan membuat keputusan berikut.
Sambungkan sensor aras air tangki bawah ke input I1, sensor aras tengah ke input I2 dan sensor aras atas ke input I3.Sambungkan butang Berhenti untuk memasukkan I4 dan butang Mula untuk memasukkan I5. Kami akan mengawal kemasukan pam No. 1 dengan bantuan output Q1, kemasukan pam No. 2 — dengan bantuan output Q2. Sambungkan penunjuk merah ke output Q3, penunjuk hijau ke output Q4.
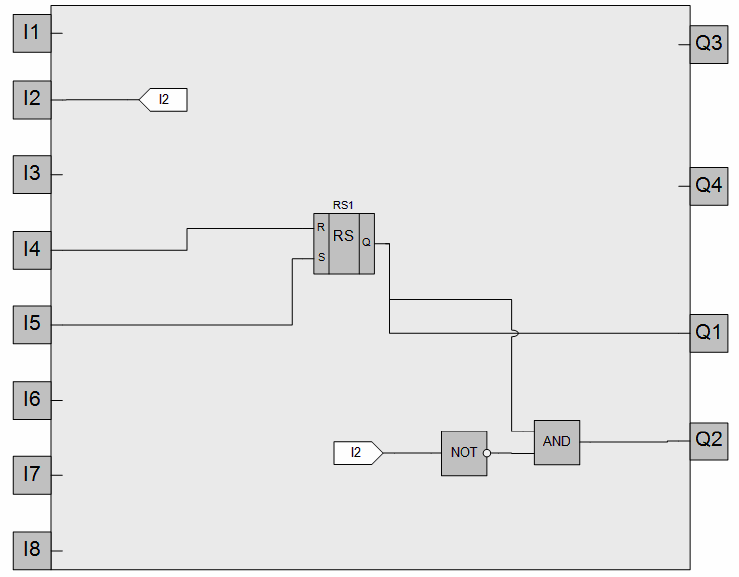
Kawalan manual dijalankan dengan menggunakan butang yang menjana isyarat kawalan jangka pendek. Agar sistem kawalan kekal dalam keadaan di mana kami akan memindahkannya dengan isyarat jangka pendek dari satu atau butang lain, pencetus diperlukan dalam program.
Mari kita perkenalkan RS1 flip-flop ke dalam program. Output flip-flop ini ditetapkan kepada satu apabila kelebihan positif tiba pada input S dan ditetapkan semula kepada sifar apabila kelebihan positif tiba pada input R. Perlu diingatkan bahawa apabila kelebihan positif tiba di input S. isyarat tiba di input, isyarat input R adalah keutamaan.
Jika paras air dalam tangki lebih tinggi daripada di atas atau kami telah menekan dan menahan butang "Berhenti" dalam keadaan ini, maka menekan butang "Mula" pada masa itu tidak sepatutnya menghidupkan pam. Oleh itu, butang «Mula» disambungkan kepada input S dengan keutamaan yang lebih rendah daripada RS1 flip-flop. Kemudian, jika tiada keadaan menghalang pam daripada dihidupkan (iaitu akan terdapat sifar logik pada input R pencetus RS1), apabila butang «Mula» ditekan, output pencetus RS1 akan ditetapkan kepada satu. Isyarat ini akan digunakan untuk mengaktifkan motor.
Daripada kedua-dua pam, pam #1 mesti dihidupkan dalam apa jua keadaan, jadi isyarat daripada output pencetus RS1 disambungkan ke output Q1. Pam #2 hanya perlu dihidupkan jika penderia tahap pertengahan tidak tersandung. Untuk memenuhi syarat ini, kami memperkenalkan penyongsang dan elemen logik DAN ke dalam program.Input penyongsang disambungkan kepada input I2, input elemen logik DAN kepada output penyongsang dan output pencetus RS1, masing-masing.
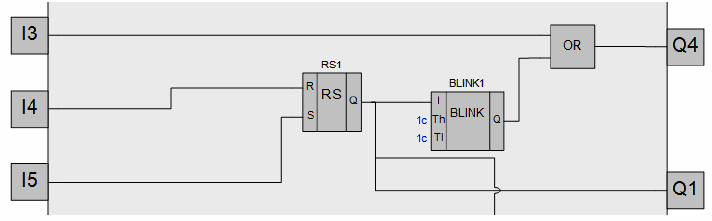
Menghidupkan pam hendaklah disertakan dengan penunjuk hijau berkelip. Untuk menjana isyarat berkala untuk menghidupkan / mematikan penunjuk hijau, kami memperkenalkan penjana gelombang persegi BLINK1 ke dalam program. Dalam tab sifat blok ini, tetapkan tempoh isyarat satu dan sifar pada outputnya menjadi sama dan sama dengan 1s. Sambungkan output pencetus RS1 kepada input pengaktifan operasi penjana BLINK1.
Kini penjana BLINK1 hanya akan berfungsi apabila output pencetus RS1 ditetapkan kepada satu iaitu. apabila pam diaktifkan. 26 Mari kita perkenalkan get OR ke dalam program. Kami menyambungkan outputnya kepada output Q4. Kami menyambungkan satu input get OR ke output penjana BLINK1, satu lagi ke input I3. Sekarang, apabila pam dihidupkan, penunjuk hijau akan berkelip, tetapi jika penderia tahap atas dicetuskan, penunjuk ini akan dihidupkan secara berterusan.
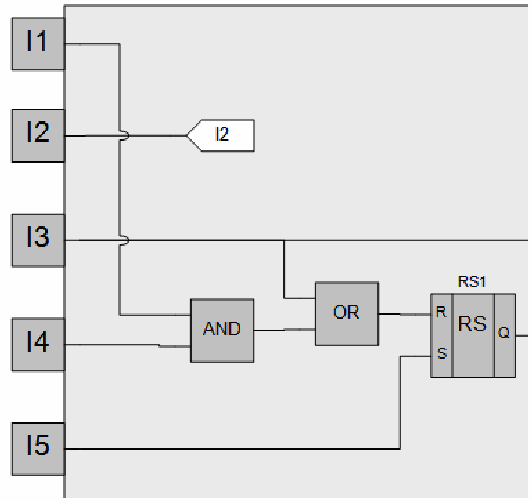
Pam harus dimatikan jika kita menekan butang "Berhenti" dan pada masa yang sama sensor tahap bawah akan berada dalam keadaan unit logik (kehadiran dengan sekurang-kurangnya air minimum dalam tangki) atau jika sensor tahap atas dicetuskan ( tangki penuh).
Untuk memenuhi syarat ini, kami memperkenalkan elemen logik OR dan elemen logik I ke dalam program. Kami menyambungkan satu input elemen logik DAN ke butang "Berhenti", satu lagi ke input I1 (dengan output tahap yang lebih rendah sensor). Kami menyambungkan satu input elemen OR ke output elemen AND, satu lagi ke input I3 (dengan output sensor peringkat atas). Output elemen OR disambungkan kepada input R bagi flip-flop RS1.
Penunjuk merah harus menyala jika dua syarat dipenuhi pada masa yang sama: pam tidak berfungsi (sifar hadir pada output pencetus RS1) dan paras air di bawah paras bawah (terdapat sifar pada output sensor tahap bawah).
Untuk "menyemak" keadaan ini dan mengawal penunjuk merah dalam program, kami memperkenalkan dua penyongsang dan elemen logik I. Input satu penyongsang disambungkan ke input I1 (dengan output sensor tahap bawah), input daripada penyongsang yang lain - dengan output pencetus RS1). Kami menyambungkan output penyongsang ke input get AND. Keluaran get AND disambungkan kepada keluaran Q3.

Pada akhirnya, secara umum, anda sepatutnya mempunyai program yang dibentangkan di bawah. Rajah menunjukkan sementara litar luaran yang disambungkan kepada geganti boleh atur cara.
Menggunakan mod emulasi persekitaran pengaturcaraan Logik OWEN, pastikan program berfungsi mengikut tugas asal. Selepas memuatkan atur cara ke dalam geganti, pastikan perkara yang sama.