Prinsip operasi dan peranti motor elektrik
Mana-mana motor elektrik direka untuk melakukan kerja mekanikal kerana penggunaan elektrik yang digunakan padanya, yang biasanya ditukar kepada gerakan berputar. Walaupun dalam teknologi terdapat model yang segera mencipta pergerakan translasi badan kerja. Ini dipanggil motor linear.
Dalam pemasangan industri, motor elektrik memacu pelbagai mesin pemotong logam dan peranti mekanikal yang terlibat dalam proses pengeluaran teknologi.
Di dalam perkakas rumah, motor elektrik menjalankan mesin basuh, pembersih vakum, komputer, pengering rambut, mainan kanak-kanak, jam dan banyak peranti lain.

Proses fizikal asas dan prinsip tindakan
Apabila bergerak ke dalam medan magnet cas elektrik, yang dipanggil arus elektrik, sentiasa mempunyai daya mekanikal yang cenderung untuk memesongkan arahnya dalam satah berserenjang dengan orientasi garis medan magnet.Apabila arus elektrik melalui wayar logam atau gegelung yang diperbuat daripadanya, daya ini cenderung untuk menggerakkan/memutar setiap wayar pembawa arus dan keseluruhan gegelung secara keseluruhan.
Foto di bawah menunjukkan bingkai logam dengan arus mengalir melaluinya. Medan magnet yang dikenakan padanya menghasilkan daya F untuk setiap cabang bingkai, yang menghasilkan gerakan putaran.

Sifat interaksi tenaga elektrik dan magnet ini, berdasarkan penciptaan daya gerak elektrik dalam gelung pengalir tertutup, dimasukkan ke dalam operasi pada setiap motor elektrik. Reka bentuknya termasuk:
-
gegelung yang melaluinya arus elektrik mengalir. Ia diletakkan pada teras penambat khas dan dipasang pada galas berputar untuk mengurangkan rintangan kepada daya geseran. Reka bentuk ini dipanggil rotor;
-
stator, yang mencipta medan magnet, yang dengan garis dayanya menembusi cas elektrik yang melalui selekoh belitan pemutar;
-
perumahan untuk meletakkan stator. Di dalam badan, tempat duduk khas dibuat, di dalamnya sangkar luar galas rotor dipasang.
Reka bentuk ringkas bagi motor elektrik termudah boleh diwakili oleh gambar bentuk berikut.

Apabila pemutar berputar, tork dijana, kuasanya bergantung pada reka bentuk umum peranti, jumlah tenaga elektrik yang digunakan dan kerugiannya semasa penukaran.
Magnitud kuasa tork maksimum yang mungkin bagi motor sentiasa kurang daripada tenaga elektrik yang digunakan padanya. Ia dicirikan oleh nilai kecekapan.
Jenis-jenis motor elektrik
Mengikut jenis arus yang mengalir melalui gegelung, ia dibahagikan kepada motor DC atau AC.Setiap dua kumpulan ini mempunyai sejumlah besar pengubahsuaian menggunakan proses teknologi yang berbeza.
Motor DC
Mereka mempunyai medan magnet stator yang dicipta oleh tetap pegun magnet kekal atau elektromagnet khas dengan gegelung pengujaan. Gegelung angker dipasang dengan kukuh dalam aci, yang dipasang pada galas dan boleh berputar bebas di sekeliling paksinya sendiri.
Struktur asas enjin sedemikian ditunjukkan dalam rajah.

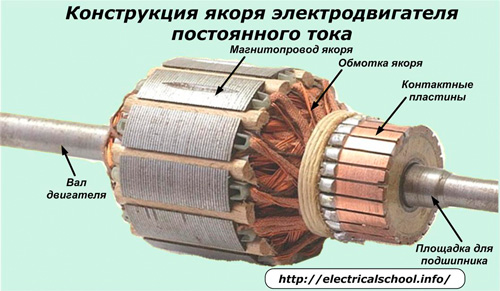
Pada teras angker, diperbuat daripada bahan feromagnetik, terdapat gegelung yang terdiri daripada dua bahagian bersambung siri, yang disambungkan ke plat pengumpul pengalir pada satu hujung dan disambungkan antara satu sama lain di hujung yang lain. Dua berus grafit terletak pada hujung yang bertentangan secara diametrik pada angker dan ditekan pada pad sentuhan plat pengumpul.
Potensi sumber DC positif digunakan pada berus corak bawah dan potensi negatif pada berus atas. Arah arus yang mengalir melalui gegelung ditunjukkan oleh anak panah merah putus-putus.
Arus menyebabkan medan magnet mempunyai kutub utara di sebelah kiri bawah angker, dan kutub selatan di sebelah kanan atas angker (peraturan gimbal). Ini mengakibatkan tolakan kutub rotor daripada kutub pegun dengan nama yang sama dan tarikan kepada kutub bertentangan stator. Akibat daya yang dikenakan, pergerakan putaran berlaku, arahnya ditunjukkan oleh anak panah coklat.
Dengan putaran lanjut angker oleh inersia, tiang dipindahkan ke plat pengumpul lain. Arah arus di dalamnya diterbalikkan. Rotor terus berputar lebih jauh.
Reka bentuk mudah peranti pengumpul sedemikian membawa kepada kehilangan besar tenaga elektrik.Motor sedemikian berfungsi dalam peranti reka bentuk mudah atau mainan untuk kanak-kanak.
Motor elektrik arus terus yang terlibat dalam proses pengeluaran mempunyai reka bentuk yang lebih kompleks:
-
gegelung dibahagikan bukan kepada dua, tetapi kepada beberapa bahagian;
-
setiap bahagian gegelung dipasang pada tiangnya sendiri;
-
peranti pengumpul dibuat dengan bilangan pad sesentuh tertentu mengikut bilangan belitan.
Akibatnya, sambungan lancar setiap kutub melalui plat sentuhannya ke berus dan sumber arus tercipta dan kehilangan tenaga dikurangkan.
Peranti penambat sedemikian ditunjukkan dalam foto.
Dalam motor DC, arah putaran rotor boleh diterbalikkan. Untuk melakukan ini, cukup untuk menukar pergerakan arus dalam gegelung ke sebaliknya dengan menukar kekutuban pada sumber.
Motor AC
Mereka berbeza daripada reka bentuk sebelumnya kerana arus elektrik yang mengalir dalam gegelung mereka diterangkan oleh hukum harmonik sinusoidalsecara berkala menukar arahnya (tanda). Untuk memberi kuasa kepada mereka, voltan dibekalkan daripada penjana dengan tanda berselang-seli.
Pemegun motor tersebut dilakukan oleh litar magnetik. Ia diperbuat daripada plat feromagnetik dengan alur di mana lilitan gegelung diletakkan dengan konfigurasi bingkai (gegelung).

Motor elektrik segerak
Foto di bawah menunjukkan prinsip pengendalian motor AC satu fasa dengan putaran segerak medan elektromagnet pemutar dan pemegun.

Dalam alur litar magnet stator pada hujung yang bertentangan secara diametrik, wayar penggulungan diletakkan, secara skematik ditunjukkan dalam bentuk bingkai di mana arus ulang-alik mengalir.
Mari kita pertimbangkan kes momen dalam masa yang sepadan dengan laluan bahagian positif separuh gelombangnya.
Dalam sel galas, pemutar dengan magnet kekal terbina dalam berputar dengan bebas, di mana «mulut N» utara dan «mulut S» selatan tiang ditakrifkan dengan jelas. Apabila arus separuh gelombang positif mengalir melalui belitan stator, medan magnet dengan kutub «S st» dan «N st» tercipta di dalamnya.
Daya interaksi timbul antara medan magnet pemutar dan pemegun (dengan kutub menolak dan tidak seperti kutub menarik) yang cenderung untuk memusingkan angker motor dari sebarang kedudukan ke ekstrem apabila kutub bertentangan terletak sedekat mungkin antara satu sama lain yang lain.
Sekiranya kita menganggap kes yang sama, tetapi buat masa ini apabila sebaliknya - gelombang separuh negatif arus melalui wayar bingkai, maka putaran angker akan berlaku ke arah yang bertentangan.
Untuk memastikan pergerakan berterusan pemutar dalam stator, bukan satu bingkai penggulungan dibuat, tetapi bilangan tertentu daripada mereka, memandangkan setiap daripada mereka dikuasakan oleh sumber arus yang berasingan.
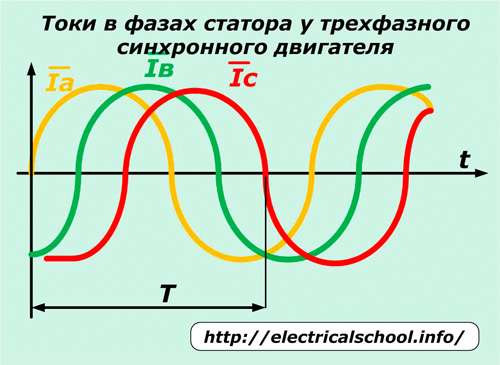
Prinsip kerja motor AC tiga fasa dengan putaran segerak, medan elektromagnet pemutar dan pemegun ditunjukkan dalam gambar berikut.

Dalam reka bentuk ini, tiga gegelung A, B dan C dipasang di dalam litar magnet stator, diimbangi oleh sudut 120 darjah antara satu sama lain. Gegelung A ditanda kuning, B berwarna hijau, dan C berwarna merah. Setiap gegelung dibuat dengan bingkai yang sama seperti dalam kes sebelumnya.
Dalam gambar, dalam apa jua keadaan, arus mengalir melalui hanya satu gegelung ke arah hadapan atau sebaliknya, yang ditunjukkan oleh tanda «+» dan «-«.
Apabila gelombang separuh positif melalui fasa A ke arah hadapan, paksi medan pemutar mengambil kedudukan mendatar, kerana kutub magnet stator terbentuk dalam satah ini dan menarik angker alih. Kutub bertentangan pemutar cenderung mendekati kutub pemegun.
Apabila separuh gelombang positif masuk ke fasa C, angker akan berputar 60 darjah mengikut arah jam. Sebaik sahaja arus digunakan pada fasa B, putaran angker yang serupa akan berlaku. Setiap aliran arus seterusnya dalam fasa seterusnya belitan seterusnya akan memutar pemutar.
Jika voltan sesalur tiga fasa yang dialihkan dengan sudut 120 darjah dikenakan pada setiap belitan, maka arus ulang alik akan beredar di dalamnya, yang akan memutarkan angker dan mencipta putaran segeraknya dengan medan elektromagnet yang digunakan.
Reka bentuk mekanikal yang sama berjaya digunakan dalam motor stepper tiga fasa... Hanya dalam setiap belitan dengan kawalan pengawal khas (pemandu motor stepper) Denyutan malar digunakan dan dikeluarkan mengikut algoritma yang diterangkan di atas.
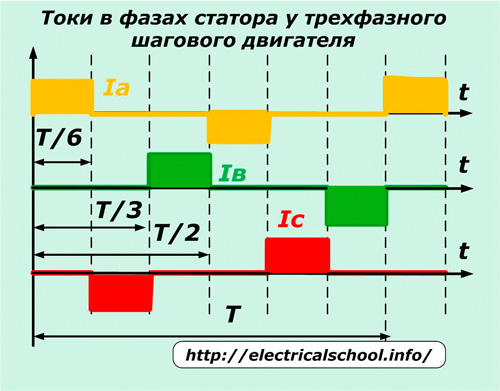
Permulaan mereka memulakan pergerakan putaran, dan penamatan mereka pada masa tertentu memberikan putaran terukur aci dan berhenti pada sudut yang diprogramkan untuk melaksanakan operasi teknologi tertentu.
Dalam kedua-dua sistem tiga fasa yang diterangkan, adalah mungkin untuk menukar arah putaran angker. Untuk melakukan ini, anda hanya perlu menukar urutan fasa «A» — «B» — «C» kepada yang lain, contohnya «A» — «C» — «B».
Kelajuan pemutar dikawal oleh panjang tempoh T. Pengurangannya membawa kepada pecutan putaran.Magnitud amplitud arus dalam fasa bergantung pada rintangan dalaman penggulungan dan nilai voltan yang digunakan padanya. Ia menentukan jumlah tork dan kuasa motor elektrik.
Motor tak segerak
Reka bentuk motor ini mempunyai litar magnet stator yang sama dengan belitan seperti dalam model fasa tunggal dan tiga fasa yang dibincangkan sebelum ini. Mereka mendapat nama mereka daripada putaran tak segerak medan elektromagnet angker dan stator. Ini dilakukan dengan menambah baik konfigurasi rotor.
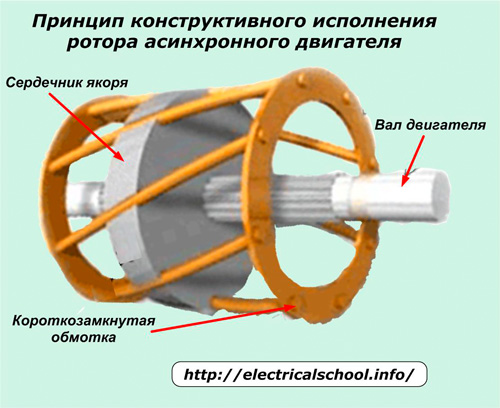
Terasnya diperbuat daripada plat keluli elektrik beralur. Mereka dilengkapi dengan konduktor semasa aluminium atau tembaga, yang ditutup pada hujung angker dengan cincin konduktif.
Apabila voltan dikenakan pada belitan stator, arus elektrik teraruh dalam belitan pemutar oleh daya gerak elektrik dan medan magnet angker tercipta. Apabila medan elektromagnet ini berinteraksi, aci motor mula berputar.
Dengan reka bentuk ini, pergerakan pemutar mungkin hanya selepas berlakunya medan elektromagnet berputar dalam pemegun, dan ia berterusan dalam mod operasi tak segerak dengannya.
Motor tak segerak lebih ringkas dalam reka bentuk. Oleh itu, ia lebih murah dan digunakan secara meluas dalam pemasangan industri dan perkakas rumah.

Motor elektrik kalis letupan ABB
Motor linear
Banyak badan kerja mekanisme perindustrian melakukan pergerakan salingan atau translasi dalam satu satah, yang diperlukan untuk operasi mesin kerja logam, kenderaan, pukulan tukul semasa memandu cerucuk ...
Menggerakkan badan kerja sedemikian dengan menggunakan kotak gear, skru bola, pemacu tali pinggang dan peranti mekanikal yang serupa daripada motor elektrik berputar merumitkan reka bentuk. Penyelesaian teknikal moden untuk masalah ini ialah pengendalian motor elektrik linear.
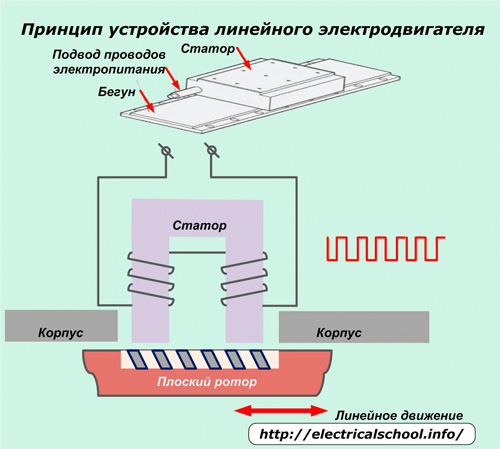
Pemegun dan pemutarnya dipanjangkan dalam bentuk jalur, bukannya digulung ke dalam gelang, seperti dalam motor elektrik berputar.
Prinsip operasi adalah untuk memberikan gerakan linear salingan kepada pemutar pelari disebabkan oleh pemindahan tenaga elektromagnet daripada stator pegun dengan litar magnet terbuka dengan panjang tertentu. Medan magnet yang berfungsi dicipta di dalamnya dengan menghidupkan arus secara berurutan.
Ia bertindak pada belitan angker dengan pengumpul. Daya yang timbul dalam motor sedemikian menggerakkan pemutar hanya dalam arah linear di sepanjang elemen panduan.
Motor linear direka bentuk untuk beroperasi sama ada pada arus terus atau arus ulang alik dan boleh beroperasi dalam mod segerak atau tak segerak.
Kelemahan motor linear ialah:
-
kerumitan teknologi;
-
harga tinggi;
-
kecekapan tenaga yang rendah.