Mod brek motor pengujaan berurutan
 Motor elektrik DC teruja siri dalam pemacu elektrik beroperasi dalam kedua-dua mod pemanduan dan brek. Berbeza dengan motor pengujaan selari, mod penjana dengan pulangan tenaga ke rangkaian untuk motor pengujaan bersiri tidak boleh digunakan, kerana peralihan kepada mod ini, seperti yang dilihat dari ciri mekanikal (Rajah 1), memerlukan kelajuan putaran tinggi yang tidak boleh diterima. Yang utama, yang paling mudah untuk dilaksanakan, ialah mod brek yang bertentangan.
Motor elektrik DC teruja siri dalam pemacu elektrik beroperasi dalam kedua-dua mod pemanduan dan brek. Berbeza dengan motor pengujaan selari, mod penjana dengan pulangan tenaga ke rangkaian untuk motor pengujaan bersiri tidak boleh digunakan, kerana peralihan kepada mod ini, seperti yang dilihat dari ciri mekanikal (Rajah 1), memerlukan kelajuan putaran tinggi yang tidak boleh diterima. Yang utama, yang paling mudah untuk dilaksanakan, ialah mod brek yang bertentangan.
Dalam pemacu mesin dengan potensi momen statik (contohnya, mengangkat win), pemindahan dari mod motor ke sebaliknya dilakukan dengan memperkenalkan rintangan tambahan dalam litar angker (titik A). Tork motor berkurangan, dan di bawah tindakan momen statik yang dicipta oleh beban, motor akan mula berputar ke arah yang bertentangan dengan tindakan momennya. Beban akan diturunkan (titik C).
Untuk mesin elektrik brek dengan tork statik reaktif (tiada rizab tenaga berpotensi), pensuisan belitan undur (terbalik) digunakan. Semua yang telah dinyatakan di atas berkaitan dengan perwakilan ciri-ciri dalam mod ini dan mod lain motor teruja bebas terpakai sama kepada motor teruja siri.
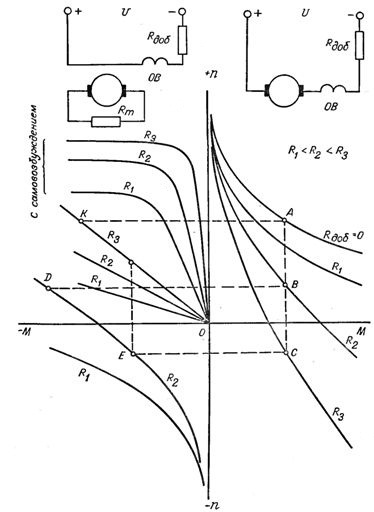
nasi. 1. Gambar rajah sambungan dan ciri mekanikal motor DC dengan pengujaan siri
Mod brek elektrodinamik Motor pengujaan siri dilaksanakan dalam dua cara: pengujaan diri dan pengujaan diri. Dengan pengujaan bebas, belitan medan disambungkan ke grid melalui perintang pengehad, dan angker yang diputuskan dari grid disambungkan ke perintang brek. Dalam kes ini, fluks magnet akan tetap, dan mod operasi dan ciri mekanikal motor akan sepadan dengan brek elektrodinamik yang serupa bagi motor pengujaan selari.
Kadang-kadang dalam brek dinamik, pengujaan diri digunakan, iaitu, angker, terputus dari rangkaian, menutup kepada rintangan brek, memaksa motor beroperasi dalam mod penjana teruja sendiri. Dalam kes ini, adalah perlu untuk menukar hujung angker atau belitan pengujaan, maka arus mod penjana akan meningkatkan fluks kemagnetan sisa, jika tidak pengujaan diri tidak akan berlaku.
Pada putaran rendah, enjin juga tidak teruja. Bermula dengan nilai kelajuan tertentu, proses pengujaan diri berjalan dengan sangat cepat, yang menyebabkan peningkatan mendadak dalam tork brek; akibatnya, bahagian mekanikal pemacu mengalami kejutan.
Fenomena sedemikian biasanya tidak diingini, itulah sebabnya pengujaan diri digunakan sekiranya berlaku perhentian kecemasan. Mod pengujaan diri tidak memerlukan kuasa gegelung daripada rangkaian.