Algoritma operasi geganti masa
 Setiap geganti masa dicirikan oleh parameternya sendiri. Parameter yang paling penting ialah algoritma operasi geganti, i.e. logik urutan kerjanya. Algoritma untuk pengendalian geganti masa ditunjukkan secara grafik dalam rajah berfungsi. Mari lihat algoritma yang paling biasa:
Setiap geganti masa dicirikan oleh parameternya sendiri. Parameter yang paling penting ialah algoritma operasi geganti, i.e. logik urutan kerjanya. Algoritma untuk pengendalian geganti masa ditunjukkan secara grafik dalam rajah berfungsi. Mari lihat algoritma yang paling biasa:
-
a — lengah hidupkan — selepas menghidupkan geganti, isyarat output muncul selepas masa yang ditetapkan telah berlalu,
-
b - pembentukan nadi apabila menghidupkan, i.e. isyarat keluaran muncul apabila geganti dihidupkan dan hilang selepas masa yang ditetapkan,
-
c — pembentukan nadi selepas penyingkiran isyarat kawalan, i.e. selepas menghidupkan geganti, isyarat keluaran muncul pada saat isyarat kawalan dikeluarkan dan hilang selepas masa yang ditetapkan,
-
d — kelewatan penutupan selepas penyingkiran voltan bekalan, i.e. isyarat keluaran muncul pada saat menghidupkan geganti masa dan hilang selepas masa yang ditetapkan selepas mengeluarkan voltan bekalan,
-
e — operasi kitaran (dengan jeda) — selepas membekalkan kuasa kepada geganti, isyarat output muncul selepas masa jeda yang ditetapkan (T1). kelewatan masa nadi (T2) berlaku dan isyarat keluaran hilang, kelewatan masa jeda (T1) berlaku, isyarat keluaran berlaku dan kelewatan masa nadi (T2) berlaku, dsb. sebelum mematikan kuasa.
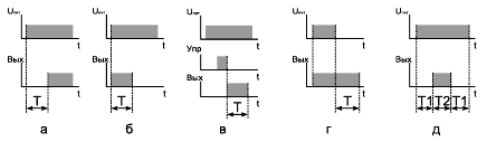
nasi. 1. Algoritma geganti masa yang paling biasa
Algoritma yang diterangkan adalah yang paling mudah, asas; algoritma yang lebih kompleks dibina berdasarkan asasnya. Geganti elektronik moden boleh menyediakan sejumlah besar algoritma kompleks untuk operasi.
Contoh gambar rajah berfungsi bagi geganti masa yang paling biasa:
1) Geganti masa dengan bekalan kuasa:

2) Geganti masa dengan isyarat kawalan luaran:

Penetapan kenalan penutup geganti masa:
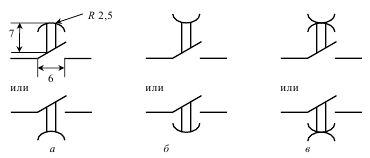
Penamaan grafik konvensional bagi kenalan penutup geganti masa: a — dengan kelewatan pada penggerak, b — dengan kelewatan pada pelepasan, c — dengan kelewatan pada penggerak dan pelepasan
Simbol Hubungan Relay Relay Masa:
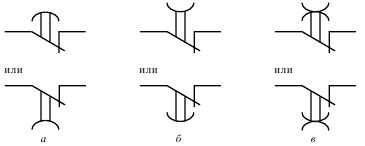
Simbol grafik konvensional bagi kenalan pembukaan geganti masa: a — dengan kelewatan pada penggerak, b — dengan kelewatan pada pelepasan, c — dengan kelewatan pada penggerak dan pelepasan