Parameter asas dan ciri-ciri geganti elektromagnet
 Alat elektrik yang menggunakan undang-undang kawalan geganti dipanggil geganti... Dalam geganti, apabila parameter kawalan (input) ditukar dengan lancar kepada nilai set tertentu, parameter terkawal (output) berubah secara tiba-tiba. Juga, sekurang-kurangnya satu daripada parameter ini mestilah elektrik.
Alat elektrik yang menggunakan undang-undang kawalan geganti dipanggil geganti... Dalam geganti, apabila parameter kawalan (input) ditukar dengan lancar kepada nilai set tertentu, parameter terkawal (output) berubah secara tiba-tiba. Juga, sekurang-kurangnya satu daripada parameter ini mestilah elektrik.
Tindakan organ berfungsi geganti elektromagnet boleh dikesan mengikut rajah dalam rajah. 1. Badan penerima A menukarkan nilai input (voltan) Uin yang dibekalkan kepada gegelung 2 litar magnet 1 kepada nilai perantaraan, i.e. dalam daya mekanikal sauh 3. Daya mekanikal sauh FЯ bertindak pada sistem sentuhan badan eksekutif B. Nilai perantaraan — daya sauh FЯ, adalah berkadar dengan nilai input Uin, dibandingkan dengan a nilai yang diberikan bagi daya Fpr yang dibangunkan oleh spring 9 badan perantaraan B. Apabila Uin <Uav, Fya
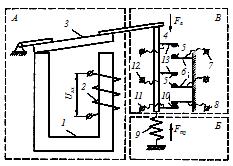 nasi. 1 Skim geganti elektromagnet
nasi. 1 Skim geganti elektromagnet
Dalam proses operasi, geganti elektromagnet pada skala masa membezakan empat fasa: tempoh (masa) tav penggerak, tempoh bekerja dua kali, tempoh (masa) penutupan, tempoh (masa) rehat tp (Gamb. . 2).
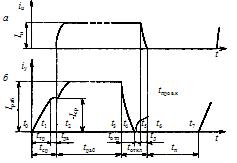
nasi. 2. Kebergantungan kuantiti keluaran (a) dan keluaran (b) pada masa
Tempoh pengaktifan geganti elektromagnet
 Tempoh tindak balas termasuk selang masa dari saat isyarat input mula menjejaskan badan pemantauan sehingga isyarat muncul dalam litar terkawal. Segmen paksi absis tav = t2 –t0 sepadan dengan tempoh ini dalam rajah. 2, b. Pada masa t0 arus dalam gegelung geganti meningkat kepada nilai di mana daya elektromagnet Fe yang bertindak pada angker mula menentang daya spring Fm (daya mekanikal) jasad perantaraan. Nilai input kemudiannya dipanggil nilai penerimaan.
Tempoh tindak balas termasuk selang masa dari saat isyarat input mula menjejaskan badan pemantauan sehingga isyarat muncul dalam litar terkawal. Segmen paksi absis tav = t2 –t0 sepadan dengan tempoh ini dalam rajah. 2, b. Pada masa t0 arus dalam gegelung geganti meningkat kepada nilai di mana daya elektromagnet Fe yang bertindak pada angker mula menentang daya spring Fm (daya mekanikal) jasad perantaraan. Nilai input kemudiannya dipanggil nilai penerimaan.
Tempoh awal sepadan dengan segmen ttr = t1 — t0. Pada masa t1, angker elektromagnet geganti mula bergerak. Semasa tdv = t2 — t1, sauh bergerak, mengatasi rintangan badan perantaraan B (lihat Rajah 1) dan mengaktifkan badan eksekutif C.
Pada penghujung lejang angker, sentuhan pemacu rapat, arus beban dalam (Rajah 2, a) mula meningkat daripada sifar kepada nilai keseimbangan. Nilai input di mana kawalan litar keluaran bermula dipanggil nilai penerimaan (Iav). Kuasa Psr yang sepadan dengan Isr dipanggil kuasa penggerak.
Masa tindak balas t cf = ttr + tdv.
Masa tindak balas geganti elektromagnet berbeza dari 1-2 hingga 20 ms. Geganti masa elektromagnet memberikan kelewatan sehingga 10 saat.
Untuk menganggarkan masa tindak balas geganti, adalah dibenarkan untuk menggunakan ungkapan
t cf = t1kz-bm –a,
di mana t1 ialah masa tindak balas untuk faktor keselamatan yang diberi ks dan faktor m = 1; a, b — pekali yang ditentukan bergantung pada jenis geganti dan nilai kz dan m.
Untuk geganti berkelajuan tinggi pada kz = 1.5¸2, nilai pekali a menghampiri perpaduan. Untuk geganti biasa dengan k z = 1.5¸3, nilai a = 0.25¸0.95, nilai pekali b biasanya dalam julat 1.4-1.6.
Tempoh operasi geganti elektromagnet
 Tempoh kerja termasuk twork selang masa = t3 — t2, i.e. masa dari saat kawalan litar keluaran t2 hingga saat penamatan kesan pada organ sensitif isyarat input t3. Arus mula meningkat kepada nilai pegun Iwork (Rajah 2, b) — ini adalah nilai kerja nilai input, yang memastikan operasi geganti yang boleh dipercayai.
Tempoh kerja termasuk twork selang masa = t3 — t2, i.e. masa dari saat kawalan litar keluaran t2 hingga saat penamatan kesan pada organ sensitif isyarat input t3. Arus mula meningkat kepada nilai pegun Iwork (Rajah 2, b) — ini adalah nilai kerja nilai input, yang memastikan operasi geganti yang boleh dipercayai.
Nisbah Iwork / Icr = kz dipanggil faktor keselamatan di tempat kerja.
Untuk mencirikan kapasiti beban lampau bagi elemen sensitif geganti, nilai kuantiti input digunakan, yang dipanggil nilai had kuantiti operasi Ioperating.max.
Had nilai kerja — ini adalah nilainya yang boleh ditahan oleh organ sensitif untuk tempoh masa normal yang singkat. Walau bagaimanapun, nilai nilai ini tidak boleh diterima apabila geganti beroperasi dalam mod biasa disebabkan oleh keadaan kekuatan elektrik atau mekanikal atau pemanasan.
Konsep kuasa kawalan Ru digunakan untuk mencirikan kapasiti tampung beban pemacu geganti. Kuasa kawalan ialah kuasa dalam litar terkawal yang pemacu boleh menghantar untuk masa yang lama.
Tempoh perjalanan geganti elektromagnet
 Tempoh off mengandungi selang masa toff = t6 — t3, i.e. masa dari saat pemberhentian impak pada organ pencerap t3 hingga saat arus dalam litar terkawal berkurangan kepada sifar (Rajah 16, a).
Tempoh off mengandungi selang masa toff = t6 — t3, i.e. masa dari saat pemberhentian impak pada organ pencerap t3 hingga saat arus dalam litar terkawal berkurangan kepada sifar (Rajah 16, a).
Tempoh off termasuk tempoh pelepasan totp = t4 — t3 di mana geganti dimatikan. Arus iy dalam gegelung geganti turun kepada sifar (Rajah 2, b). Dalam tempoh ini, daya spring lawan (daya mekanikal) melebihi daya elektromagnet, i.e. Fm> Fe dan angker dilepaskan.
Selepas memilih kegagalan kenalan (selang tc = t5 — t4), kenalan geganti terbuka dan arka dinyalakan di antara mereka, yang padam selepas masa td = t6 — t5. Dalam tempoh td, arus dalam litar terkawal berkurangan dari In kepada sifar (Rajah 2, a).
Masa luar t t = tp + tc + td.
Tempoh tersandung dicirikan oleh faktor pemulihan, iaitu nisbah arus jatuh Iotp kepada arus pikap Iav: kv = Iotp / Icr.
Biasanya, untuk geganti perlindungan sistem kuasa dan geganti kawalan yang mengawal parameter input dalam had yang sempit, kv harus lebih dekat dengan perpaduan.
Tempoh rehat geganti elektromagnet
Tempoh rehat ialah selang masa tp = t7 — t6.
Tempoh kependaman dicirikan oleh parameter yang dipanggil nilai tidak beroperasi, iaitu nilai terbesar bagi kuantiti input yang memastikan geganti tidak beroperasi atau dipegang. Masa penutupan adalah lebih pendek daripada masa mula beroperasi dan masa keluaran.
Nisbah kuasa kawalan kepada kuasa penggerak dipanggil keuntungan, ku = Py / Pcr.
Bilangan permulaan setiap unit masa ditentukan oleh nilai yang berkadar songsang dengan masa kitaran:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota O.B.