Penggerak dalam sistem automasi faundri
Penggerak dalam sistem kawalan proses automatik direka untuk menjejaskan objek terkawal atau kawalannya secara langsung.
Keperluan
Pemacu mesti memenuhi keperluan berikut:
-
mempunyai ciri statik linear yang mungkin;
-
mempunyai kuasa yang mencukupi untuk menetapkan objek kawalan atau organnya bergerak dalam semua mod operasi;
-
mempunyai prestasi yang diperlukan;
-
untuk memastikan peraturan nilai pengeluaran yang paling mudah dan ekonomik;
-
mempunyai kuasa stereng yang rendah.
Ciri-ciri semasa bekerja di faundri

Sistem automasi untuk proses faundri dicirikan oleh kehadiran dua mod kawalan: jauh dan automatik.
Untuk pemacu dalam sistem kawalan jauh, penunjuk utama adalah tenaga, sebagai tambahan, ciri operasi, struktur dan ekonomi diperlukan.
Untuk pemacu dalam sistem kawalan automatik, yang paling penting ialah sifat statik dan dinamiknya, yang menjejaskan kestabilan dan kualiti peraturan. Ciri-ciri pilihan penggerak dalam sistem automasi untuk proses tuangan mesti diambil kira dalam reka bentuknya.
Parameter tenaga utama pemacu (kawalan jauh) ialah tork nominal (daya yang dibangunkan pada kawalan nominal) dan tork permulaan (daya yang dibangunkan pada saat dihidupkan di bawah tindakan isyarat kawalan nominal).
Nisbah tork permulaan kepada momen inersia yang dikurangkan pemacu menentukan inersianya, iaitu, masa dari permulaan pergerakan kepada kelajuan nominal pergerakan elemen keluaran dalam keadaan mantap. Untuk mengurangkan masa pecutan, tork permulaan tidak boleh melebihi tork terkadar 2 — 2.5.

Dalam sistem kawalan kedudukan di mana tindakan kawalan mempunyai dua setpoint, penggerak mesti menyediakan keupayaan untuk menukar tindakan kawalan daripada nilai maksimum.
Dalam sistem dengan pengawal selia kelajuan malar, tindakan kawalan pada objek ditentukan oleh masa pergerakan badan pengawal selia, kelajuan permutasi yang bergantung pada data teknikal penggerak.
Dalam sistem kawalan berkadar, tindakan kawalan pada objek adalah berkadar dengan sisihan parameter daripada nilai yang ditetapkan, dan faktor kekadaran bergantung pada reka bentuk penggerak, peranti brek dan selepas perjalanan selepas perjalanan.
Dalam beberapa sistem kawalan automatik untuk proses faundri, penggerak dilindungi oleh maklum balas mengenai kedudukan pengawal selia. Penilaian lanjutan sifat statik dan dinamik pemacu dijalankan dengan mengambil kira ketepatan dan kelajuannya.
Apabila mereka bentuk penggerak, adalah perlu untuk menetapkan kelajuan pergerakan peranti keluarannya pada beban nominal dan isyarat kawalan yang sepadan dengan kelajuan pergerakan nominal peranti keluaran.
Pelbagai jenis penggerak digunakan dalam sistem automasi faundri. Dengan reka bentuk, mereka dibahagikan kepada elektromekanik, elektromagnet, hidraulik, pneumatik dan gabungan.
Pemacu elektromekanikal
Pemacu elektromekanikal digunakan untuk mengawal pelbagai badan berhenti dan mengawal selia sistem automasi. Kit mungkin termasuk motor elektrik, kotak gear, suis had, klac pengehad tork dan sensor maklum balas.

Pemacu elektromekanikal termasuk peranti untuk memusing baldi untuk menuang automatik, membuka dan menutup corong untuk dispenser penimbang dalam sistem pencampuran dan pencampuran, pengecasan pelebur, dsb.

Dalam proses penuangan ini, pemacu elektromekanikal menyediakan:
-
mula jauh atau automatik pemacu elektrik menggunakan butang mula "Tutup" dan "Buka";
-
menghentikan pemacu elektrik dalam mana-mana kedudukan pertengahan dengan menggunakan butang atau sesentuh suis had;
-
penutupan kecemasan sekiranya berlaku lebihan beban kritikal;
-
isyarat cahaya jauh kedudukan akhir badan kerja (lif, bahagian bawah corong, senduk tuang, dsb.;
-
penyekatan elektrik oleh mekanisme lain.
Pemacu elektromagnet
Pemacu elektromagnet ialah gabungan elektromagnet dengan peranti mekanikal yang digerakkan olehnya. Mereka memberikan gerakan ke hadapan kepada pemacu organ terkawal.

Penggerak elektromagnet digunakan untuk mengawal injap, pintu, injap dan kili dalam sistem automasi untuk mengawal selia bekalan jet kubah, pemanasan, bekalan oksigen dalam proses pembuatan keluli, dalam sistem menggunakan peranti elektro-hidraulik atau elektro-pneumatik, di mana solenoid menggerakkan injap kawalan, dsb.
Kelemahan injap dan injap solenoid ialah dengan pensuisan hampir serta-merta, tukul air boleh berlaku.
Pemacu hidraulik
Penggerak hidraulik digunakan secara meluas dalam talian dan sistem tuangan automatik kerana fakta bahawa ia membenarkan tindakan jangka pendek yang ketara sebanyak 5 - 7 kali lebihan beban, mempunyai momen keluaran yang besar (daya) pada saiz yang kecil dan boleh memberikan pecutan sudut melebihi 20,000 rad / s .
Pemacu omboh hidraulik yang paling banyak digunakan, di mana minyak petroleum, cecair sintetik, campuran alkohol-gliserin, dll. digunakan sebagai bendalir kerja.
Dalam sistem tuangan, pemacu omboh yang paling biasa digunakan ialah lakonan tunggal dan berganda.
Kelemahan pemacu hidraulik termasuk jisimnya yang besar, penggunaan kuasa yang ketara untuk kawalan dan kesukaran untuk menghapuskan kemalangan.
Untuk membetulkan beberapa kelemahan utama, pemilihan kaedah dan undang-undang brek dan pengiraan parameter reka bentuk peranti brek silinder hidraulik yang digunakan dalam faundri adalah sangat penting.
Pilihan silinder hidraulik dan peranti brek tertentu ditentukan oleh cara ia berfungsi. Pada kelajuan rendah, adalah dibenarkan untuk menggunakan silinder hidraulik memandu tanpa peranti brek dengan brek bahagian bergerak struktur atau peralatan terhadap pengehad. Apabila kelajuan kerja meningkat kepada 80 mm / s, perlu menggunakan peranti brek.
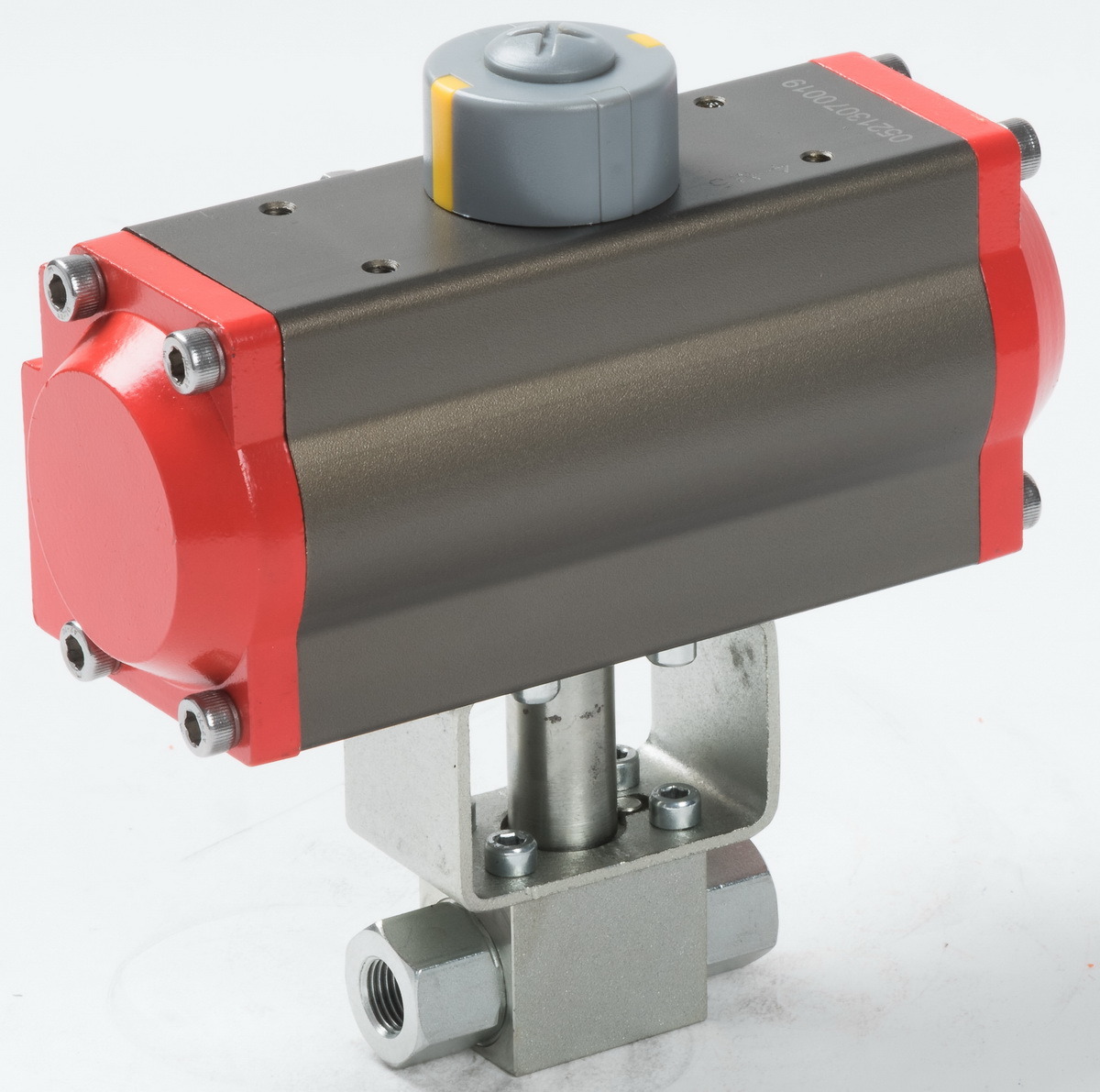
Pemacu pneumatik

Pemacu pneumatik pembinaan dengan cara yang sama seperti hidraulik. Perbezaannya terletak pada sifat medium kerja (gas dan cecair) Kebolehmampatan gas mempunyai kesan negatif ke atas operasi sistem, terutamanya di bawah beban dan pecutan yang ketara.
Pemacu pneumatik dibahagikan kepada omboh dan diafragma. Penggerak omboh pneumatik adalah biasa dalam faundri kerana kesederhanaan dan kosnya yang rendah.
Pada masa yang sama, persekitaran yang agresif dalam proses tuangan memaksa pereka bentuk untuk membangunkan silinder pneumatik khas untuk mesin tuangan automatik. Silinder pneumatik sedemikian dihasilkan dalam reka bentuk tertutup di mana batangnya tidak bersentuhan dengan alam sekitar.
Mereka menggunakan silinder sehala yang disambungkan oleh rak tunggal ke gear pada aci keluaran. Putaran aci ditukar oleh engkol kepada gerakan linear, dan walaupun penukaran berganda mengakibatkan kehilangan kuasa, mekanisme ini tahan lama.
Penggerak gabungan

Peranti baharu daripada Festo membolehkan anda menyelesaikan tugasan dengan pergerakan bermotor yang mudah dan secara bijak menukar data daripada pengawal kepada PLC melalui IO-Link. Siri pemacu elektrik ini menggabungkan kesederhanaan pneumatik dengan kelebihan automasi elektrik.
Pemacu elektrik siri Pergerakan Mudah ialah penyelesaian gerakan dengan permotoran bersepadu dan kawalan untuk tugasan mudah. Mereka membenarkan anda untuk beroperasi dan komisen tanpa perisian, pada prinsip "plug and play".
Parameter untuk suapan dan kelajuan pemulangan, daya penggerak, tetapan kedudukan akhir, redaman dan kawalan manual boleh ditetapkan terus pada pemacu menggunakan butang fizikal.
Pilihan
Apabila memilih penggerak untuk sistem automasi faundri, pertimbangkan kelajuan, kecekapan, operasi yang senyap. Setiap metrik ini, pada satu tahap atau yang lain, boleh menjadi penting untuk menyelesaikan masalah automasi tertentu.
Walau bagaimanapun, terdapat satu kriteria utama yang harus diutamakan dalam reka bentuk atau pemilihan mana-mana penggerak — iaitu kebolehpercayaan yang tinggi.
Dalam hal ini, adalah disyorkan untuk menggunakan lebih meluas, apabila boleh, pemacu elektromagnet dan elektromekanikal dengan skema kinematik mudah.
Dalam kes di mana pemacu hidraulik atau pneumatik digunakan, perhatian mesti diberikan kepada kebolehpercayaan peranti pengedap dan pengurangan jisim bahagian yang bergerak.
Lihat juga: Cara pengukuran dan kawalan teknikal dalam faundri