Contoh skema pemacu elektrik untuk mekanisme jenis emparan dan salingan
 Dalam rajah. 1 a menunjukkan gambar rajah teknologi pam pemasangan saliran lombong yang direka bentuk untuk mengepam air bawah tanah dari tumit aci lombong dan muka tertimbus. Pemasangan termasuk dua pam 1H dan 2H dengan tangki pengisian 1B dan 2B, yang memastikan pengecasan berterusan pam.
Dalam rajah. 1 a menunjukkan gambar rajah teknologi pam pemasangan saliran lombong yang direka bentuk untuk mengepam air bawah tanah dari tumit aci lombong dan muka tertimbus. Pemasangan termasuk dua pam 1H dan 2H dengan tangki pengisian 1B dan 2B, yang memastikan pengecasan berterusan pam.
Pam digerakkan secara putaran oleh motor tak segerak dengan tupai 1D dan 2D, yang untuk kebolehpercayaan yang lebih besar disambungkan ke bahagian bas yang berbeza pada pencawang penurun (Rajah 1, b). Sekiranya paras air di dalam lubang berada di bawah paras kerja, maka pam tidak mengepam air. Apabila air melebihi paras kerja, salah satu pam dimasukkan ke dalam operasi. Apabila paras air meningkat melebihi paras kecemasan, pam sandaran kedua disambungkan untuk berfungsi.
Skim pergerakan yang dikuasakan oleh elektrik membenarkan kawalan berbeza bagi motor pam:
• secara automatik bergantung pada paras air dalam lubang,
• dari jauh (dari bilik kawalan),
• kampung tempatan butang kawalanterletak terus di pam.
Pemilihan AU Auto dan alat kawalan jauh adalah melalui suis universal 1UP dan 2UP. Suis 1PP dan 2PP membolehkan anda memilih kaedah kawalan untuk setiap motor: alat kawalan jauh dan setempat menggunakan butang 1KU dan 2KU. Suis perisian membenarkan pemakaian seragam peralatan untuk menggunakan motor 1D dan 2D secara bergilir-gilir sebagai motor berjalan.
Mulakan enjin automatik pam kerja dilaksanakan menggunakan suis apungan 1PR, yang mengawal paras air kerja. Motor pam sandaran dihidupkan oleh geganti apungan 2PR, yang mengawal tahap kecemasan.
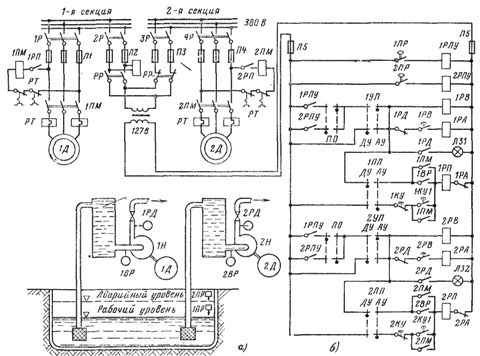
nasi. 1. Pemasangan penyahairan (a) dan litar elektrik (b).
Jika selepas masa tunda geganti 1PB atau 2PB pam tidak menghasilkan tekanan yang diperlukan, motor diputuskan daripada rangkaian. Enjin tidak akan dihidupkan walaupun pam tidak diisi sepenuhnya dengan air (paras air tidak mencukupi dalam tangki pengisian dan sesentuh geganti kawalan pengisian 1BP atau 2BP terbuka).
Dalam rajah. 2 menunjukkan gambar rajah pemacu elektrik automatik bagi pemampat salingan. Motor pemampat tak segerak boleh dimulakan dari tapak pemasangan pemampat menggunakan butang 2KP, dan juga dari bilik kawalan menggunakan butang 1KP. Kebenaran mula diberikan melalui geganti 2RP jika tekanan dalam penerima udara (penerima) kurang daripada biasa. Dalam kes ini, sesentuh penutup suis tekanan 1RP dalam litar geganti 2RP ditutup, gegelung geganti 2RP mengalirkan arus, dan sesentuh penutup 2RP dalam litar penyentuh talian KL ditutup.
Selepas menghidupkan penyentuh KL, gegelung injap elektrohidraulik 1KEG ditenagakan, yang membekalkan air penyejuk kepada pemampat. Selepas beberapa lama, geganti RV menerima kuasa kepada geganti 4RP, yang menghidupkan injap 2KEG. Injap ini akan menutup saluran keluar udara dari pemampat ke atmosfera. Kelewatan geganti PB lebih lama sedikit daripada masa mula enjin, jadi injap 2KEG terbuka dan menghidupkan enjin dipermudahkan.
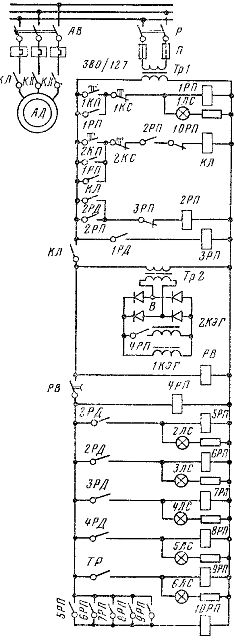
nasi. 2. Gambar rajah pemacu elektrik pemampat salingan.
Sekiranya aliran udara rendah dan tekanan dalam penerima melebihi norma, maka hubungan 1RD dalam litar geganti 3RP ditutup. Yang terakhir, dengan sesentuh pembukaannya, mematikan geganti 2RP. Litar sesentuh KL kehilangan kuasa, dan enjin terputus dari rangkaian. Apabila aliran udara meningkat dan tekanan dalam penerima berkurangan berbanding dengan norma, suis tekanan akan menutup kenalan atasnya 1RD dan akan menghidupkan geganti 2RP. Gegelung penyentuh KL akan kembali bertenaga dan pemampat akan dimulakan dengan cara yang sama seperti yang diterangkan di atas.
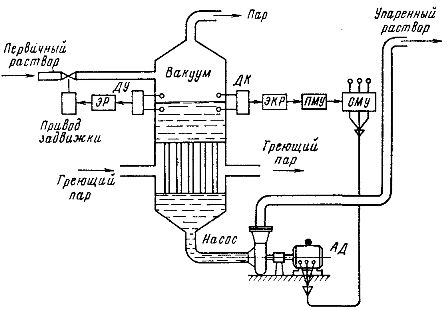
nasi. 3. Skim loji penyejatan cecair
Litar ini menyediakan penutupan automatik enjin jika tekanan udara peti sejuk, tekanan air penyejuk dan minyak yang dibekalkan ke galas utama, dan suhu minyak berada di luar julat. Parameter yang ditentukan dikawal menggunakan suis tekanan 2RD, 3RD, 4RD dan TP geganti suhu. Isyarat penutupan motor disalurkan melalui geganti 5RP — 9RP untuk menyampaikan 10RP, yang membuat penutupan kecemasan kontaktor KL.
Dalam rajah. 3 menunjukkan gambar rajah loji penyejatan cecair automatik.Dalam kes ini, pam termasuk dalam proses teknologi utama untuk pengeluaran cecair. Larutan alkali disejat dalam penukar haba, di mana kepekatan cecair ditingkatkan ke tahap yang diperlukan. Radas beroperasi di bawah vakum untuk menurunkan takat didih larutan dan oleh itu untuk mengurangkan haba yang dibekalkan kepada radas melalui pemanasan wap. Pemilihan cecair dari radas dan bekalannya ke peringkat penyejatan seterusnya atau ke tangki pengumpul dijalankan secara berterusan dengan bantuan pam. Tahap kepekatan cecair yang diperlukan dikekalkan oleh sistem kawalan kekal.
Sistem ini termasuk penderia untuk tahap kawalan dan kepekatan cecair DC dalam radas, pengawal selia elektronik ER dan EK R., injap pemacu di salur masuk radas dan pemacu pam elektrik di alur keluar. Kepekatan cecair diukur dengan sensor suhu jambatan kerana suhu wap tepu di atas cecair bergantung kepada ketumpatannya.
Tahap kepekatan yang diperlukan ditetapkan dengan potensiometer dalam pengawal selia elektronik EKR. Apabila kepekatan meningkat berbanding tahap tertentu, voltan keluaran EKR dan arus kawalan PMU penguat magnet perantaraan meningkat. Kelajuan motor pam meningkat dan aliran pam meningkat. Ini membawa kepada pengurangan masa penyejatan cecair yang melalui radas. Oleh itu, kepekatan mula berkurangan.
Dengan penurunan paras cecair dalam radas akibat peningkatan aliran pam, sensor aras alat kawalan jauh melalui pengawal selia ER memberikan isyarat untuk membuka injap masuk lebih banyak.Aliran masuk tambahan penyelesaian memulihkan tahap dalam radas dan menyumbang kepada pemulihan terpantas tahap kepekatan pratetap.
Dalam rajah. 4 menunjukkan gambar rajah pemacu elektrik automatik pam dengan kuasa sehingga 7 — 10 kW. Pam digerakkan oleh motor aruhan sangkar tupai. Kelajuan motor dikawal menggunakan penguat magnet tiga fasa SMU, yang termasuk dalam litar stator. Kepala statik besar pemasangan membolehkan untuk menyediakan julat yang diperlukan untuk melaraskan aliran pam dengan perubahan kecil dalam kelajuan motor.
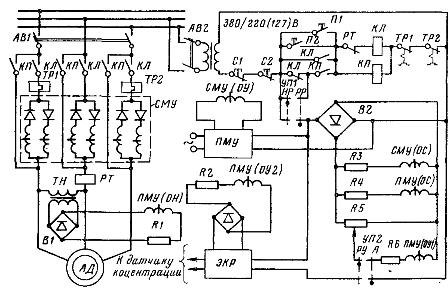
nasi. 4. Gambar rajah pemacu elektrik pam penyejat.
Untuk mendapatkan ciri mekanikal pemacu elektrik yang cukup tegar, sebagai tambahan kepada gandingan arus positif dalaman yang dicipta oleh belitan kerja SMU, gandingan voltan negatif digunakan. Penggunaan PMU memungkinkan untuk meningkatkan kuasa keluaran EKR ke tahap yang diperlukan untuk mengawal SMU, serta mengurangkan saiz pengubah voltan VT dan meningkatkan ketegaran ciri mekanikal. Untuk meningkatkan tork enjin semasa memulakan, penguat kuasa magnet digerakkan oleh penyentuh kotak gear.
Litar kawalan enjin membenarkan memulakan dan memberhentikan pam dari panel kawalan utama dan dari tempat pemasangannya (butang P1, P2, C1, C2). Suis UP1 membolehkan anda menetapkan mod operasi tidak terkawal pam HP apabila SMU kekal dikelilingi oleh KP penyentuh, dan pam membangunkan prestasi maksimum, serta mod boleh laras PP, apabila KP pada akhir permulaan dimatikan oleh RT geganti semasa dan belitan kerja SMU dimasukkan ke dalam litar stator. Menggunakan suis UP2, anda boleh memilih salah satu mod operasi boleh laras pam: automatik A atau kawalan manual RU.