Pemanduan troli elektrik dengan kren atas kepala
Troli dengan kren atas ialah elemen bebas bagi peranti mengangkat dan direka bentuk untuk menggerakkan beban dalam julat kren atas dengan kelajuan pergerakan yang ditentukan secara teknologi dan ketepatan yang diperlukan untuk meletakkan beban. Pemacu bogie adalah salah satu komponen utama peralatan kren atas.
Troli itu bergerak di atas landasan kren atas. Jambatan itu sendiri bergerak dalam arah yang berserenjang dengan arah gerakan kereta. Mekanisme mengangkat dipasang pada troli, yang dilengkapi dengan cangkuk (atau elektromagnet) yang dengannya anda boleh menggerakkan beban. Pergerakan bogie adalah sebahagian daripada kitaran teknologi kren atas (Rajah 1).
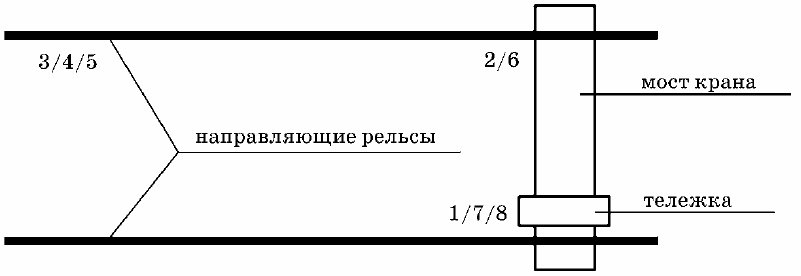
nasi. 1. Skim untuk menjalankan operasi dengan kren jambatan dalam kitaran kerja
Kitaran ini terdiri daripada operasi berikut (dalam Rajah 1, nombor operasi ditunjukkan dalam nombor):
1 - mengangkat beban;
2 — menggerakkan troli ke kedudukan tertentu;
3 — menggerakkan kren ke kedudukan yang telah ditetapkan;
4 - mengurangkan berat beban;
5 — mengangkat cangkuk dengan berat beban;
6 — menggerakkan kren ke kedudukan asalnya;
7 — mengalihkan troli ke kedudukan asalnya;
8 - menurunkan cangkuk.
Seperti yang dapat dilihat daripada kitaran proses kren atas, motor pemacu troli dihidupkan dalam operasi kedua dan ketujuh. Apabila bogie menghampiri kedudukan tertentu dalam jarak kren atas, motor elektrik pemacu bogie dibrek elektrik untuk memastikan ketepatan brek yang diperlukan.
Enjin kemudiannya dimatikan dan brek mekanikal digunakan. Di samping itu, pemacu elektrik pergerakan jambatan dihidupkan dan beban bergerak di sepanjang bengkel mengikut tugas teknologi. Mencapai tempat yang ditetapkan, kren berhenti, beban diturunkan, dan kemudian operasi teknologi yang diperlukan dijalankan.

Gambar rajah kinematik mekanisme pergerakan troli dengan kren atas ditunjukkan dalam Rajah 2. Mekanisme pergerakan troli dibuat mengikut skema dengan kotak gear di tengah antara roda pemacu.
Pemacuan dari motor elektrik D melalui cakera brek T, kotak gear P, klac M dan aci B dihantar ke roda yang sedang berjalan. Takal brek digunakan untuk memastikan kereta tidak bergerak.
Troli mempunyai empat roda perjalanan dan dua roda pemacu. Roda kembara troli kren biasanya dibuat dengan dua rusuk.
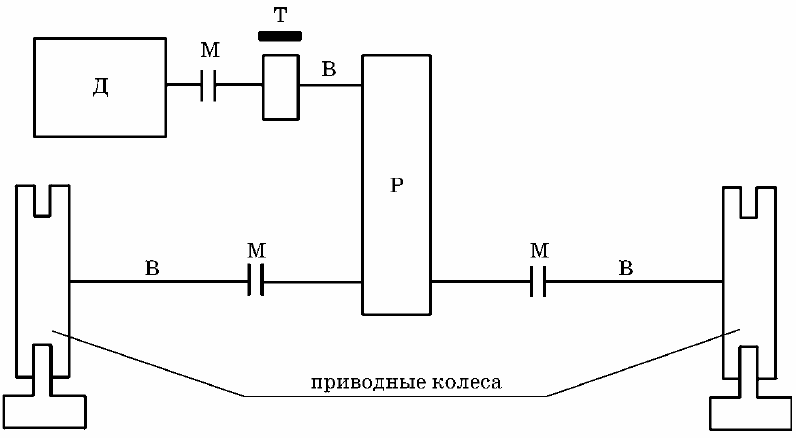
nasi. 2. Gambar rajah kinematik mekanisme pergerakan troli
Masa untuk mengalihkan troli ke kedudukan yang ditentukan akan ditentukan dengan mengambil kira masa untuk memecut dan memecut troli dengan pecutan yang diperlukan.Berdasarkan syarat proses teknologi, tachogram semasa menggerakkan troli hendaklah mempunyai bentuk yang ditunjukkan dalam Rajah 3.
Ia adalah perlu untuk memastikan permulaan lancar mekanisme bogie ke kelajuan tertentu dengan pecutan yang diperlukan. Untuk memastikan ketepatan kedudukan yang diperlukan, nyahpecutan lancar pemacu elektrik dengan peralihan kepada kelajuan yang dikurangkan diperlukan, selepas itu troli berhenti.
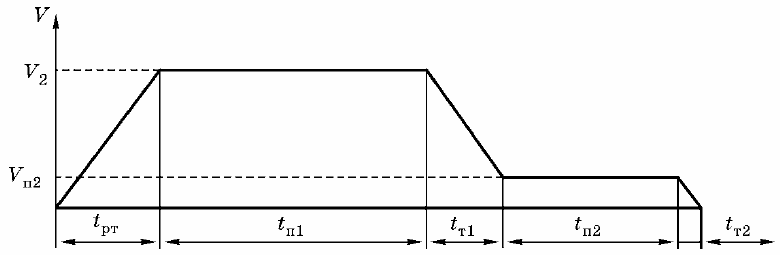
nasi. 3. Tachogram mekanisme pergerakan troli
Pergerakan bogie dengan kesan pada struktur logam dalam sambungan rel, pecutan dan nyahpecutan yang kuat, getaran semula jadi struktur logam apabila mesin dimuatkan menyebabkan kesan mekanikal yang sangat kuat pada peralatan elektrik yang terletak pada bogie kren jambatan. Berdasarkan ini, pemacu elektrik untuk menggerakkan troli mesti memenuhi keperluan berikut:
1) pemacu elektrik mesti menyediakan keupayaan untuk memulakan mekanisme dalam gerakan, membalikkan arah pergerakan dan menghentikan mekanisme dengan pecutan yang diperlukan (m / s2) dan ketepatan kedudukan yang betul (mm);
2) pemacu elektrik mesti menyediakan kawalan kelajuan lancar turun dari utama;
3) tork enjin yang dibangunkan mesti memastikan operasi mekanisme pada keamatan tertentu;
4) pada bilangan tertentu enjin dihidupkan sejam, tidak boleh terlalu panas belitannya, yang menyebabkan pemberhentian mekanisme yang berpanjangan mungkin;
5) motor mesti dipilih mengikut keadaan operasi, iaitu, ia mesti mempunyai reka bentuk yang sesuai, dan belitannya mestilah tahan haba dan mempunyai penebat terhadap kelembapan;
6) motor pemacu mesti mempunyai jisim roda tenaga terkecil yang mempunyai kesan ketara ke atas aliran transien semasa pemacu yang kerap dimulakan;
7) motor pemacu mesti sepadan dengan kuasa mekanisme berjalan dan mempunyai kapasiti beban lampau yang diperlukan;
8) pemacu elektrik mesti memastikan pembentukan proses sementara dengan tempoh minimum;
9) keselamatan dan kemudahan penyelenggaraan mesti diambil kira dalam reka bentuk pemacu elektrik.

Momen statik untuk mekanisme gerakan yang beroperasi pada garisan trek mendatar dalam kemudahan pengeluaran dicipta dengan gelongsor daya geseran dalam galas dan geseran bergolek roda bogie yang bergolek pada rel kren atas. Momen statik mekanisme semasa pergerakan troli ke hadapan ditentukan oleh kapasiti mengangkat kren. Momen statik mekanisme semasa pergerakan terbalik bogie dikira untuk beban yang tidak lengkap.
Untuk pemacu elektrik troli kren atas, motor pemutar sangkar tupai tak segerak (termasuk sebagai sebahagian daripada pemacu frekuensi berubah-ubah), motor aruhan rotor luka dan motor DC teruja secara bebas.