Penderia bukan hubungan untuk kedudukan mekanisme
 Dalam artikel ini kita akan bercakap mengenai sensor kedudukan mekanisme. Pada asasnya, fungsi utama mana-mana sensor adalah untuk memberi isyarat apabila peristiwa tertentu berlaku. Iaitu, apabila peristiwa pencetus berlaku, sensor diaktifkan dan menghasilkan isyarat, yang boleh menjadi analog atau diskret, digital.
Dalam artikel ini kita akan bercakap mengenai sensor kedudukan mekanisme. Pada asasnya, fungsi utama mana-mana sensor adalah untuk memberi isyarat apabila peristiwa tertentu berlaku. Iaitu, apabila peristiwa pencetus berlaku, sensor diaktifkan dan menghasilkan isyarat, yang boleh menjadi analog atau diskret, digital.
Penderia had telah digunakan sebagai penderia kedudukan selama beberapa dekad. suis. Ia terdiri daripada sesentuh elektrik yang membuka atau menutup secara mekanikal apabila beberapa pembolehubah (kedudukan) mencapai nilai tertentu. Suis had pelbagai jenis adalah bahagian penting dalam banyak sistem kawalan, kebolehpercayaan yang bergantung kepada mereka. penderia tersebut mengandungi elemen mekanikal bergerak yang sumbernya terhad.
Suis had sedang aktif digantikan oleh pelbagai penderia kehampiran. Selalunya penderia jarak jenis berikut: induktif, penjana, magnetohercon dan fotoelektronik. Penderia ini tidak mempunyai sentuhan mekanikal dengan objek bergerak yang kedudukannya sedang dipantau.
Penderia kedudukan bukan hubungan memastikan kelajuan tinggi dan frekuensi tinggi menghidupkan mekanisme. Kelemahan tertentu sensor ini adalah pergantungan, ketepatannya, pada perubahan voltan bekalan dan suhu. Bergantung pada keperluan, peranti output peranti ini boleh menjadi seperti berikut elemen logik tanpa sentuhdan geganti elektrik.
Dalam skema brek ketepatan pemacu elektrik, penderia jarak boleh digunakan untuk mengarahkan anjakan ke bawah dan berhenti terakhir.
Terdapat banyak jenis sensor di pasaran hari ini, tetapi dalam rangka artikel ini kami akan menyerlahkan topik secara langsung sensor kedudukan induktif, kerana dalam lebih daripada 80% kes ia adalah sensor induktif yang berfungsi sebagai sensor untuk kedudukan mekanisme.
Sensor induktif dicetuskan apabila logam menghampiri zon pencetusnya. Atas sebab ini, penderia kedudukan induktif juga dipanggil penderia kehadiran, penderia jarak atau hanya suis induktif.
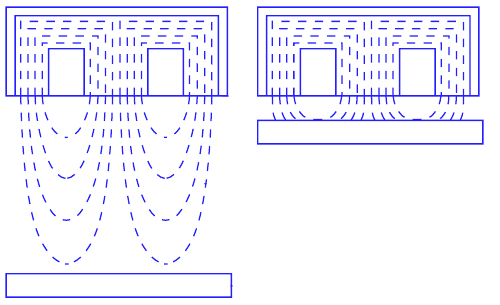
Sekarang mari kita pertimbangkan prinsip operasi sensor induktif. Seperti yang dinyatakan di atas, apabila logam cukup dekat dengan zon pencetus, sensor diaktifkan. Fenomena ini terdiri daripada interaksi yang terlibat induktor dengan logam menghampirinya, yang secara mendadak mengubah magnitud medan magnet gegelung, yang membawa kepada pengaktifan sensor, ia dicetuskan, isyarat yang sepadan muncul pada outputnya.
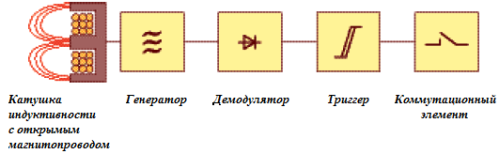
Bahagian elektronik peranti mengandungi litar kawalan, yang seterusnya mengawal suis geganti atau transistor. Ia terdiri daripada bahagian berikut:
-
Penjana yang mencipta medan elektromagnet yang diperlukan untuk berinteraksi dengan objek.
-
Pencetus Schmitt menyediakan histeresis pensuisan.
-
Penguat untuk meningkatkan amplitud isyarat supaya mencapai nilai penggerak yang diperlukan.
-
Penunjuk LED memaklumkan tentang status suis. Ia juga menyediakan pemantauan dan konfigurasi prestasi.
-
Sebatian untuk melindungi daripada penembusan zarah pepejal dan air.
-
Perumahan untuk memasang sensor dan perlindungan daripada pelbagai pengaruh mekanikal. Ia diperbuat daripada loyang atau poliamida dan dilengkapkan dengan pengikat.
Penderia kedudukan induktif digunakan secara meluas dalam sistem automasi industri di mana ia perlu untuk secara berkala atau berterusan menentukan kedudukan mana-mana bahagian mekanisme. Sensor menjana isyarat yang dihantar ke pemacu. Pemula, pengawal, geganti, penukar frekuensi, dll. boleh bertindak sebagai mekanisme eksekutif. Perkara utama ialah parameter sensor sepadan dengan parameter pemacu dari segi voltan dan arus.
Kebanyakan sensor bukan peranti kuasa, ia terutamanya peranti isyarat, oleh itu sensor itu sendiri, sebagai peraturan, tidak menukar apa-apa yang berkuasa, tetapi hanya mengawal, memberikan isyarat kawalan, bertindak sebagai peranti permulaan tindakan yang sudah boleh disambungkan kepada pensuisan kuasa.
Penderia kedudukan induktif moden paling kerap ditemui dalam dua versi perumah plastik atau logam: segi empat tepat atau silinder. Diameter sensor dengan keratan rentas bulat boleh dari 4 hingga 30 mm, tetapi diameter yang paling biasa digunakan ialah 18 dan 12 mm.
Apabila sensor dipasang pada peralatan, jurang ditetapkan antara plat logam dan zon penggerak sensor, biasanya jarak ini tidak melebihi diameter sensor dan, sebagai peraturan, ternyata 2-3 kali lebih kecil daripada diameternya.
Mengikut kaedah sambungan, sensor kedudukan induktif boleh menjadi dua wayar, tiga wayar, empat wayar dan lima wayar.
Dua wayar terus menukar beban, seperti gegelung pemula, iaitu, ia berfungsi seperti suis konvensional. Penderia dua wayar memerlukan rintangan beban, jadi ia tidak selalunya sesuai sebagai alat yang boleh dipercayai, tetapi ia tidak kehilangan kaitannya.
Beban hanya disambungkan secara bersiri dengan sensor, jika voltan malar digunakan maka adalah penting untuk memerhatikan kekutuban, jika kekutuban berselang-seli tidak penting, perkara utama ialah kuasa dan arus yang ditukar.
Penderia tiga wayar mempunyai wayar ketiga untuk menggerakkan penderia itu sendiri, dan ini adalah penyelesaian yang paling popular. Penderia empat wayar dan lima wayar mempunyai output transistor atau geganti untuk menyambungkan beban, dan wayar kelima membolehkan anda memilih mod pengendalian sensor, keadaan awal output.
Memandangkan output boleh menjadi geganti dan transistor, sensor dibahagikan kepada tiga jenis mengikut peranti output: geganti, npn dan pnp.
Penderia dengan output geganti
Penderia dengan keluaran geganti mempunyai pengasingan galvanik litar bekalan daripada litar yang disertakan. Ia menukar satu wayar dan voltan dalam litar suis tidak begitu kritikal. Oleh kerana litar bekalan kuasa sensor diasingkan secara galvani, ini boleh dianggap sebagai kelebihan sensor geganti. Sensor jenis ini biasanya besar.
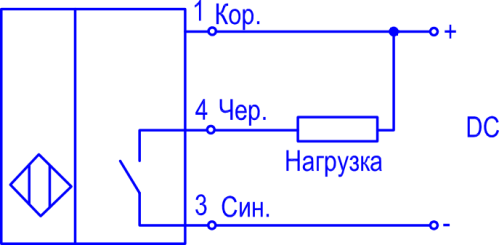
Penderia dengan output transistor pnp
Sensor mempunyai transistor pnp pada output yang mengubah wayar positif dengan beban. Beban disambungkan kepada litar pengumpul transistor pnp keluaran, yang disambungkan secara kekal kepada negatif melalui petunjuk kedua.
Penderia dengan output transistor npn
Sensor mempunyai transistor NPN pada output yang mengubah wayar negatif dengan beban. Beban disambungkan kepada litar pemungut transistor npn keluaran, yang disambungkan secara kekal oleh plumbum kedua kepada plumbum positif.
Mengikut keadaan awal output, penderia kedudukan induktif boleh ditutup atau biasa dibuka kenalan biasanya. Keadaan awal bermakna keadaan ini berada pada masa sensor belum dicetuskan, iaitu, ia tidak diaktifkan.
Jika sesentuh output biasanya ditutup, maka beban disambungkan pada masa melahu, jika ia biasanya terbuka, maka sehingga sensor dicetuskan, beban akan terputus dan tiada kuasa akan dibekalkan kepada pemacu (cth. contactor). Biasanya kenalan tertutup ditetapkan dalam format bahasa Inggeris — N.C. (Biasanya Ditutup), Biasanya Terbuka — N.O. (Biasanya terbuka).
Oleh itu, penderia dengan output transistor terdiri daripada empat jenis: dua jenis mengikut kekonduksian (pnp atau npn) dan dua jenis mengikut keadaan awal output. Mungkin juga terdapat kelewatan semasa menghidupkan atau mematikan.

Bergantung pada jenis pemacu yang disambungkan kepada penderia, serta kaedah bekalan kuasa, logik penderia boleh menjadi positif atau negatif. Ini disebabkan oleh tahap voltan yang mengaktifkan input peranti.
Jika input diaktifkan apabila wayar negatif penggerak disambungkan ke tanah, ke tolak, maka logik dipanggil negatif, sambungan sedemikian adalah ciri sensor dengan output transistor jenis npn.
Logik positif sepadan dengan menyambungkan wayar positif pemacu ke bekalan kuasa positif apabila diaktifkan, logik ini adalah tipikal bagi penderia dengan output transistor pnp. Selalunya, terdapat logik positif untuk operasi sensor induktif untuk kedudukan mekanisme.
Jenis penderia kedudukan induktif yang lebih lama yang paling biasa digunakan
Penderia kedudukan induktif IKV-22
Penderia induktif IKV-22. Operasi penderia ini adalah berdasarkan prinsip menukar rintangan induktif gegelung dengan teras keluli apabila jurang udara dalam litar magnetik berubah.
Litar magnet dengan dua gegelung dipasang pada plat keluli, ditutup dengan penutup plastik. Dua kapasitor MBGP (satu dengan kapasiti 15 μF, 200 V, satu lagi dengan kapasiti 10 μF, 400 V) dipasang pada plat dari bahagian bawah. Kapasitor ditutup dengan penutup. Kabel disambungkan melalui meterai. Pistol magnet dipasang pada mekanisme, dimensi yang mesti sekurang-kurangnya: ketebalan 2 mm, lebar 80 mm, panjang 140 mm. Jurang udara antara litar magnet dan shunt ialah 6 ± 4 mm.
Geganti keluaran biasanya dihidupkan dan dimatikan pada masa apabila shunt magnetik melalui sensor, apabila disebabkan oleh perubahan dalam rintangan induktif gegelung, resonans semasa berlaku dan arus melalui gegelung geganti jatuh. Geganti ini: taip MKU-48, 12 V AC, lukis arus tidak lebih daripada 0.45 A, arus jatuh tidak kurang daripada 0.1 A.Voltan bekalan litar sensor ialah geganti 24 V AC.
Penderia kedudukan induktif ID-5
Dalam bengkel metalurgi, sensor induktif jenis ID-5 digunakan, direka untuk bekerja pada suhu ambien sehingga + 80 ° C dan kelembapan sehingga 100%. Habuk dan skala konduktif boleh diterima. Penguat keluaran semikonduktor jenis UID-10 digunakan dengan sensor. Kuasa keluaran penguat (25 W) adalah mencukupi untuk menghidupkan geganti REV-800 yang meluas, penyentuh KP21, MK-1, dsb.
Jurang udara antara penderia dan objek feromagnetik yang diperhatikan boleh mencapai sehingga 30 mm. Dimensi sensor ID-5 ialah 187x170x70 mm, voltan bekalan ialah 220 V ± 15%, 50 Hz.
Suis tanpa sentuh BSP bersaiz kecil
Suis gerakan kecil BSP-2 (dengan output bukan hubungan, kepada elemen logik) dan BRP (dengan output untuk menyampaikan PE-21, 24 V, 16 Ohm) digunakan pada mesin pemotong logam.
Suis BSP-2 terdiri daripada sensor pengubah pembezaan dan pencetus semikonduktor. Sistem magnet bagi gegelung sensor pertama digerakkan oleh plat keluli, dan gegelung kedua dimanipulasi semasa ia bergerak ke atas sistem magnetnya yang disambungkan kepada mekanisme angker rata. Gegelung dihidupkan ke arah yang bertentangan.
Jika angker berada di atas penderia, tindak balas induktif bagi gegelung adalah sama dan output penderia pengubah pembezaan adalah sifar. Dalam kes ini, voltan sekurang-kurangnya 2.5 V muncul pada output pencetus, yang cukup untuk elemen logik berfungsi.
Sekiranya tiada angker di atas penderia, voltan dikenakan pada pencetus, yang mengembalikannya kepada keadaan asalnya. Kemudian isyarat keluaran suis adalah sifar.
Prinsip operasi suis BRP dalam banyak cara serupa dengan BSP-2. Sensor induktif (mengikut litar pengubah pembezaan), pencetus dan penguat dipasang di dalam kotak. Gegelung sekunder dengan bilangan lilitan yang berbeza dihidupkan ke arah yang bertentangan. Apabila angker bertindih dengan sistem magnetik sensor, isyarat berkurangan dan selepas menukar fasa, pencetus dihidupkan dan geganti keluaran luaran (PE-21, 24 V, 16 Ohm) diaktifkan.
Penambat yang dipasang pada mekanisme mempunyai dimensi 80x15x3 mm. Jurang antara sauh dan sensor ialah 4 mm. Ketepatan suis dalam mod nominal ialah ± 0.5 mm, pembezaan penggerak tidak lebih daripada 5 mm. Pada. turun naik dalam voltan bekalan dan suhu, ralat suis BSP-2 dan BRP boleh mencapai ± (2.5-f-3.0) mm.
Penderia induktif frekuensi tinggi VKB
Penderia induktif berketepatan tinggi jenis VKB dengan angker berbentuk U atau rata juga digunakan untuk automasi mesin pemotong logam. Kutub pengubah terbina dalam membentuk sistem elektromagnet terbuka. Jurang udara kerja ialah 0.1-0.15 mm.
Voltan keluaran daripada belitan sekunder pengubah disalurkan ke litar pengukuran pembezaan dan kemudian ke penguat transistor. Jumlah ralat sensor dengan turun naik suhu dari 5 hingga 40 ° C dan voltan dari 85 hingga 110% daripada nilai nominal ialah ± (0.064-0.15) mm, perbezaan tindak balas tidak melebihi 0.4 mm. Kelajuan pergerakan maksimum mekanisme ialah 10 m / mm. Dimensi penderia 62x34x24 mm. Voltan bekalan 12 V.
Jenis khas penderia induktif ketepatan untuk mesin pemotong logam dengan litar pembezaan mempunyai ralat kurang daripada ± 0.01 mm.Penderia sedemikian termasuk suis gerakan bukan hubungan jenis VPB12, yang terdiri daripada unit penderia pada unit elektronik. Unit penderia termasuk penderia kerja induktif, penderia pampasan induktif dan papan litar bercetak. Mekanisme dipasang: mengawal elemen ferit. Voltan bekalan 12 V DC. Jarak pendedahan maksimum tidak lebih daripada 0.12 mm. Geganti jenis RPU-0 boleh disambungkan ke output sensor. Arus beban maksimum peranti output ialah 0.16 A.
Penderia kedudukan penjana
Penderia jenis ini padat dan sangat tepat. Penjana sensor siri KVD-6M dan KVD-25 (dengan slot), KVP-8 dan KVP-16 (pesawat) telah membuktikan diri mereka dengan baik. Ia sesuai untuk digunakan dalam kepekatan kelembapan dan habuk yang tinggi. Unsur-unsur litar transistor sensor (penjana dan pencetus) terletak di dalam perumahan yang diperbuat daripada polistirena tahan kejutan. Pengedap dilakukan dengan sebatian pengerasan sejuk. Julat suhu operasi adalah dari - 30 hingga +50 ° C.
Penderia HPC menjana isyarat diskret apabila plat logam («bendera») melalui slot, menyebabkan kerosakan dalam penjanaan dan penukaran pencetus. Lebar slot ialah 6 mm untuk penderia KVD-6M dan 25 mm untuk penderia KVD-25.
Sensor KVP-8 dan KVP-16 diaktifkan apabila plat logam melepasinya pada jarak maksimum 8 dan 16 mm, masing-masing.