Pemilihan motor untuk lif dan mesin angkat dengan kuasa
 Lif penumpang dan barang moden bangunan kediaman dan pentadbiran, serta beberapa mesin untuk mengangkat lombong, dilakukan dengan pengimbang atau, seperti yang kadang-kadang dipanggil, dengan pengimbang. Dalam jentera perlombongan, pengimbangan, seperti yang telah dinyatakan, selalunya dilakukan bukan oleh pengimbang, tetapi oleh kapal pengangkat kedua.
Lif penumpang dan barang moden bangunan kediaman dan pentadbiran, serta beberapa mesin untuk mengangkat lombong, dilakukan dengan pengimbang atau, seperti yang kadang-kadang dipanggil, dengan pengimbang. Dalam jentera perlombongan, pengimbangan, seperti yang telah dinyatakan, selalunya dilakukan bukan oleh pengimbang, tetapi oleh kapal pengangkat kedua.
Pengimbang untuk lif dipilih untuk mengimbangi berat kapal pengangkat (kereta) dan sebahagian daripada beban nominal yang akan diangkat:

di mana GH ialah berat beban angkat nominal, N; G0 - berat kabin, N; Gnp ialah berat pengimbang, N; α ialah faktor pengimbang, biasanya diambil bersamaan dengan 0.4-0.6.
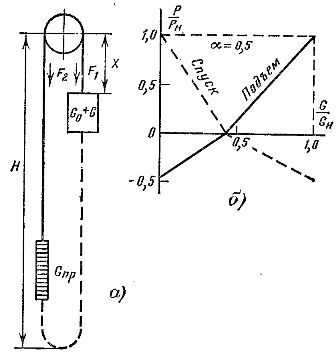
nasi. 1. Untuk mengira beban pada aci motor lif.
Keperluan untuk mengimbangi kapal berat adalah jelas, kerana untuk memindahkannya tanpa ketiadaan pengimbang, peningkatan kuasa enjin yang sepadan diperlukan. Keupayaan untuk mengimbangi sebahagian daripada muatan berkadar didedahkan apabila menentukan kuasa setara untuk lengkung beban tertentu.Tidak sukar untuk mengikuti, sebagai contoh, jika lif berfungsi terutamanya untuk menaikkan beban dan menurunkan kereta kosong, maka kuasa enjin yang setara mengikut rajah beban mempunyai minimum pada α = 0.5.
Kehadiran pemberat pengimbang menyebabkan lengkung beban enjin menjadi rata, yang mengurangkan pemanasannya semasa operasi. Merujuk kepada rajah yang ditunjukkan dalam Rajah. 1, a, kemudian dengan nilai berat timbangan

dan ketiadaan tali pengimbang dan geseran kabin dan pemberat pengimbang pada panduan, anda boleh menulis:


di mana gk ialah berat 1 m tali, N / m.
Kekuatan tegangan

Tork dan kuasa aci motor ditentukan berdasarkan formula berikut:
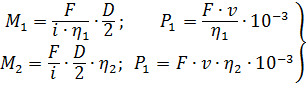
di mana M1, P1 — tork dan kuasa apabila pemacu beroperasi dalam mod motor, Nm dan kW, masing-masing; M2, P2 — tork dan kuasa apabila pemacu beroperasi dalam mod penjana, Nm dan kW, masing-masing; η1, η2 — kecekapan gear cacing dengan pemindahan tenaga langsung dan terbalik.
Nilai η1 dan η2 secara tak linear bergantung pada kelajuan aci cacing dan boleh dikira dengan formula

di sini λ ialah sudut pendakian garis lingkaran pada silinder pengindeksan cacing; k1 ialah pekali yang mengambil kira kerugian dalam galas dan mandi minyak kotak gear; ρ - sudut geseran, bergantung pada kelajuan putaran aci cacing.
Dari formula daya pada sheave tarikan, ia mengikuti bahawa jika tiada tali pengimbang, beban pada pemacu elektrik win pengangkat bergantung pada kedudukan kapal pengangkat.
Oleh kerana kapasiti bebannya yang besar — sehingga 10 tan, kelajuan pergerakan yang tinggi — 10 m / s dan lebih, ketinggian angkat tinggi 200-1000 m dan keadaan kerja yang keras, mesin pengangkat lombong dilengkapi dengan tali keluli dengan jisim yang besar. Bayangkan, sebagai contoh, satu laluan diturunkan ke ufuk bawah, manakala satu lagi di atas, dan pada masa itu ia dipunggah. Dalam kedudukan ini, keseluruhan tali kepala tidak seimbang, dan pada permulaan pendakian motor mesti mengatasi momen statik yang dihasilkan oleh berat beban dan tali. Mengimbangi tali berlaku di tengah-tengah laluan lompat. Kemudian ia putus lagi dan berat bahagian tali yang menurun akan membantu memunggah enjin.
Pemuatan yang tidak sekata, terutamanya di lombong yang dalam, membawa kepada keperluan untuk melebihkan kuasa enjin.Oleh itu, pada ketinggian mengangkat lebih daripada 200-300 m, adalah disyorkan untuk mengimbangi tali pengangkat kepala dengan bantuan tali ekor yang digantung. daripada kapal pengangkat. Biasanya, tali ekor dipilih dengan keratan rentas dan panjang yang sama dengan yang utama, akibatnya sistem pengangkatan ternyata seimbang.
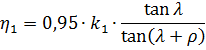
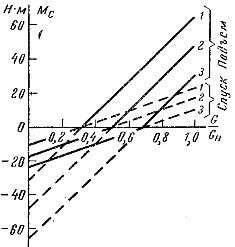
Oleh kerana beban berubah semasa operasi lif dan mesin angkat, untuk menentukan kuasa atau momen aci motor untuk setiap beban, adalah mudah untuk membina graf pergantungan nilai-nilai ini pada beban. pada beberapa titik, yang mempunyai watak yang lebih kurang sama seperti yang ditunjukkan dalam rajah. 1b dan kemudian gunakannya dalam membina gambar rajah beban.
Dalam kes ini, mod operasi pemacu elektrik mesin pengangkat mesti diketahui, yang sebahagian besarnya ditentukan oleh tempoh relatif pengaktifan PV dan bilangan permulaan setiap jam motor. Untuk lif, sebagai contoh, mod operasi pemacu elektrik ditentukan oleh tempat pemasangan dan tujuan lif.
Di bangunan kediaman, jadual lalu lintas adalah agak seragam, dan tempoh relatif — PV dan kekerapan permulaan motor h adalah sama dengan 40% dan 90-120 permulaan sejam, masing-masing. Di bangunan pejabat bertingkat tinggi, beban lif meningkat dengan mendadak semasa waktu ketibaan dan pelepasan pekerja dari kerja dan, oleh itu, semasa rehat tengah hari, nilai tinggi akan mempunyai PV dan h-40-60% dan 150 -200 bermula setiap jam.
Selepas lukisan selesai beban statik pada aci motor, sistem pemacu elektrik dan motor angkat telah dipilih, peringkat kedua membina gambar rajah beban boleh dilakukan — dengan mengambil kira kesan sementara pada gambar rajah beban.
Untuk membina gambar rajah beban yang lengkap, adalah perlu untuk mengambil kira masa pecutan dan nyahpecutan pemacu elektrik, masa membuka dan menutup pintu, bilangan berhenti semasa pergerakan kereta, masa memasuki dan keluar penumpang semasa kitaran kerja yang paling tipikal. Untuk lif dengan pintu yang dikendalikan secara automatik, jumlah kehilangan masa yang ditentukan oleh operasi pintu dan pengisian kereta ialah 6-8 s.
Masa pecutan dan nyahpecutan kereta boleh ditentukan dari gambar rajah gerakan jika kelajuan nominal kereta dan nilai pecutan (nyah pecutan) dan jerk yang dibenarkan diketahui. Menurut gambarajah beban, dibina mengikut mod statik dan dinamik yang ditunjukkan sistem pemacu elektrik, adalah perlu untuk membuat pengiraan pengiraan motor apabila dipanaskan, menggunakan salah satu kaedah yang terkenal: kerugian purata atau nilai yang setara.
nasi. 2. Kebergantungan tork pemacu elektrik pada beban kereta, lif, apabila yang terakhir berada di tingkat pertama (1), di tengah-tengah aci (2) dan di tingkat terakhir (3).

Satu contoh. Menurut data teknikal lif penumpang berkelajuan tinggi, tentukan momen statik pada aci motor dalam mod operasi yang berbeza.
Diberi:
• kapasiti beban maksimum Gn = = 4900 N;
• kelajuan pergerakan v = 1 m / s;
• ketinggian mengangkat H = = 43 m;
• berat kabin G0 = 6860 N;
• berat pengimbang Gnp = 9310 N;
• diameter rasuk daya tarikan Dm = 0.95 m;
• nisbah penghantaran kotak gear win i = 40;
• kecekapan penghantaran, dengan mengambil kira geseran kabin pada pemandu aci η = 0.6;
• berat tali GKAH = 862 N.
jadual 1

Kekuatan tegangan:


Apabila sistem lif berfungsi, apabila Fc > 0, mesin elektrik memandu berfungsi dalam mod motor, dan apabila Fc ialah 0, dan dalam mod motor apabila Fc < 0.
Keputusan pengiraan momen statik mengikut formula diringkaskan dalam jadual. 1 dan ditunjukkan dalam graf rajah. 2.Ambil perhatian bahawa pengiraan yang lebih tepat harus mengambil kira rintangan terhadap pergerakan panduan aci, iaitu 5-15% daripada Fc.