Peranti kawalan kelajuan enjin
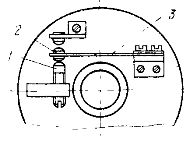
Motor elektrik tak segerak digunakan secara meluas dalam litar brek lawan arus. geganti kawalan kelajuan aruhan... Aci input geganti 5, di mana magnet kekal silinder 4 dipasang, disambungkan kepada aci motor elektrik, yang kelajuan sudutnya akan dikawal.
Apabila motor elektrik berputar, medan magnet melintasi wayar litar pintas 3 pemegun berputar 6. EMF teraruh dalam belitan, yang nilainya berkadar dengan kelajuan sudut putaran aci. Di bawah pengaruhnya, arus muncul dalam gegelung dan timbul daya interaksi, yang cenderung untuk memutarkan stator 6 ke arah putaran magnet.
Pada kelajuan putaran tertentu, daya meningkat dengan begitu banyak sehingga pengehad 2, mengatasi rintangan spring rata, menukar kenalan geganti. Relay dilengkapi dengan dua nod kenalan: 1 dan 7, yang ditukar bergantung pada arah putaran.
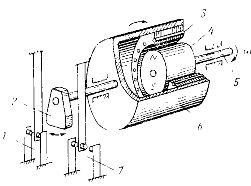
Rajah 1. Geganti kawalan kelajuan induktif
Geganti kawalan kelajuan aruhan mempunyai reka bentuk yang agak kompleks dan ketepatan yang rendah yang hanya boleh diterima untuk sistem kawalan kasar. Ketepatan peraturan kelajuan yang lebih tinggi boleh dicapai dengan menggunakan tachogenerator — mesin mikro pengukur, voltan pada terminal yang berkadar terus dengan kelajuan putaran.
Penjana tacho digunakan dalam sistem maklum balas pemacu kelajuan berubah dengan julat rpm yang luas dan oleh itu mempunyai ralat hanya beberapa peratus. Yang paling biasa ialah tachogenerator DC.
Dalam rajah. 2 menunjukkan gambar rajah geganti kawalan kelajuan untuk motor elektrik M menggunakan penjana tachogenerator G, litar angkernya termasuk geganti elektromagnet K dan reostat pengawal selia R. Apabila voltan pada terminal angker tachogenerator melebihi voltan kendalian, geganti dihidupkan dalam litar luaran.
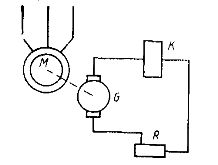
Rajah 2. Relay kawalan kelajuan dengan tachogenerator
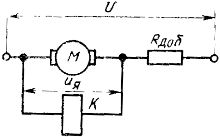
 Rajah 3. Skema jambatan takometer
Rajah 3. Skema jambatan takometer
Apabila rintangan litar angker meningkat, ketepatan litar meningkat. Oleh itu, kadangkala geganti disambungkan kepada tachogenerator melalui penguat semikonduktor perantaraan. Ia juga mungkin untuk menggunakan elemen ambang bukan sentuhan semikonduktor dengan voltan tindak balas yang stabil untuk tujuan ini.
Kebolehpercayaan litar boleh dipertingkatkan jika tachogenerator DC digantikan oleh tachogenerator tak segerak tanpa sentuh.
Tachogenerator tak segerak mempunyai rotor bukan magnet berongga yang dibuat dalam bentuk kaca. Stator mempunyai dua belitan pada sudut 90 ° antara satu sama lain. Salah satu gegelung disambungkan ke rangkaian arus ulang-alik.Voltan sinusoidal dikeluarkan dari belitan lain, yang berkadar dengan kelajuan pemutar. Kekerapan voltan keluaran sentiasa sama dengan kekerapan sesalur kuasa.
 Dalam motor DC Executive moden, tachogenerator dibina ke dalam perumahan yang sama dengan mesin dan dipasang pada aci yang sama dengan motor utama. Ini mengurangkan riak voltan keluaran dan meningkatkan ketepatan peraturan kelajuan.
Dalam motor DC Executive moden, tachogenerator dibina ke dalam perumahan yang sama dengan mesin dan dipasang pada aci yang sama dengan motor utama. Ini mengurangkan riak voltan keluaran dan meningkatkan ketepatan peraturan kelajuan.
Tachogenerator DC jenis PT-1 dengan pengujaan elektromagnet biasanya digunakan dalam motor elektrik siri PBST. Tork yang tinggi Motor DC Saya mempunyai tacho teruja magnet kekal terbina dalam.
Dalam kes di mana motor DC M tidak mempunyai tachogenerator, kelajuannya boleh dikawal dengan mengukur EMF angker. Untuk ini, litar jambatan takometrik digunakan, yang dibentuk oleh dua perintang: R1 dan R2, angker Ri dan kutub tambahan Rdp mesin. Voltan keluaran jambatan takometer Uout = U1 — Udp, atau
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
Kesamaan terakhir adalah sah di bawah syarat bahawa fluks magnet motor elektrik adalah malar. Termasuk elemen ambang pada output jambatan takometrik, geganti diperoleh yang ditetapkan kepada kelajuan putaran sudut tertentu. Ketepatan jambatan tachometer adalah rendah disebabkan oleh kebolehubahan rintangan sentuhan berus dan ketidakseimbangan pemanasan rintangan.
Jika motor DC beroperasi pada ciri buatan dan rintangan tambahan yang besar disertakan dalam angker, fungsi geganti kelajuan boleh dilakukan oleh geganti voltan yang disambungkan ke terminal angker.
Voltan dalam angker motor elektrik Uja = E + IjaRja.
Oleh kerana I = (U — E) / (Ri + Rext), kita dapat Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, maka sebutan kedua boleh diabaikan dan voltan terminal angker boleh dianggap berkadar terus dengan emf dan kelajuan putaran motor.
Rajah 4. Kawalan kelajuan dengan geganti voltan
 Rajah 5. Geganti kawalan kelajuan emparan
Rajah 5. Geganti kawalan kelajuan emparan
Mereka mempunyai reka bentuk yang sangat mudah. suis kelajuan emparan... Asas geganti adalah plat muka plastik 4, dipasang pada aci, kelajuan putaran yang mesti dikawal. Spring rata 3 dengan sesentuh boleh alih besar-besaran 2 dan sesentuh boleh laras tetap 1 dipasang pada plat hadapan. Spring diperbuat daripada keluli khas, modulus keanjalannya boleh dikatakan bebas daripada perubahan suhu.
Apabila plat muka berputar, daya emparan bertindak pada sentuhan alih, yang pada kelajuan putaran tertentu mengatasi rintangan spring rata dan menukar kenalan. Arus dibekalkan kepada peranti sentuhan melalui gelang gelincir dan berus, tidak ditunjukkan dalam rajah. Geganti sedemikian digunakan dalam sistem penstabilan kelajuan untuk mikromotor DC. Walaupun kesederhanaannya, sistem ini mengekalkan kelajuan dengan ralat pada urutan 2%.
