Kaedah intuitif untuk mereka bentuk skim kawalan
 Kaedah intuitif — kaedah membangunkan skim kawalan berdasarkan pengalaman yang diperoleh dalam pelbagai organisasi reka bentuk dalam automasi pelbagai mekanisme. Ia berdasarkan intuisi kejuruteraan pereka bentuk.
Kaedah intuitif — kaedah membangunkan skim kawalan berdasarkan pengalaman yang diperoleh dalam pelbagai organisasi reka bentuk dalam automasi pelbagai mekanisme. Ia berdasarkan intuisi kejuruteraan pereka bentuk.
Hanya seorang yang telah menyerap semua pengalaman terdahulu dan mempunyai kebolehan tertentu dari segi merangka skema, yang boleh berfikir secara abstrak dan menaakul secara logik, dapat menguasai kaedah ini dengan sempurna. Walaupun kerumitannya, kebanyakan pereka elektrik menggunakan kaedah intuitif secara meluas.
Sebagai contoh, pertimbangkan gambarajah kinematik yang dipermudahkan bagi tuil tolak (Rajah 1). Apabila roda 5 berputar mengikut arah jam, tuil 4 memutarkan tuil 1 mengenai paksi O, dengan itu memaksa kasut 3 dengan tuil 2 untuk menterjemah. Dengan putaran selanjutnya roda 5, arah pergerakan tuil 1 berubah dan kasut kembali ke kedudukan asalnya, selepas itu enjin mesti berhenti.
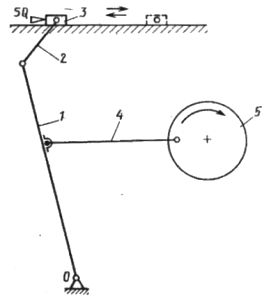
nasi. 1. Gambarajah skematik kawalan penolak tuil
Mekanisme yang dipertimbangkan ialah wakil tipikal peranti penolak.Dalam kitaran pertama, mekanisme dihidupkan dan berjalan. Dalam langkah kedua ia tidak berfungsi. Kitaran di mana mekanisme tidak berfungsi dipanggil sifar. Walaupun kasut berbalas-balas sepenuhnya (ke hadapan dan ke belakang), motor elektrik yang tidak boleh diterbalikkan boleh digunakan untuk pendorongan.
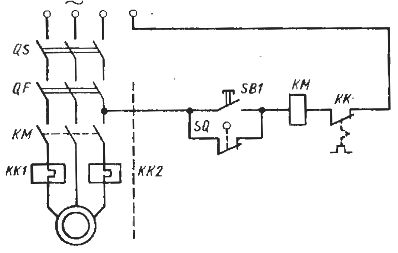
Litar kawalan motor elektrik tuil-omboh terdiri daripada dua bahagian (dalam Rajah 1 ia dipisahkan oleh garis putus-putus): litar kuasa dan litar kawalan.
Pertimbangkan tujuan unsur-unsur litar kuasa. Arus tiga fasa dibekalkan kepada suis QS, yang memotong bekalan kuasa kepada motor elektrik sekiranya berlaku pembaikan atau kerosakan pada pemula magnet. Kemudian arus mengalir melalui pemutus litar yang pelepasan QF ditunjukkan dalam rajah. Ia direka untuk melindungi dan memutuskan bekalan kuasa ke pemacu sekiranya berlaku arus litar pintas. Sesentuh utama pemula magnet KM menghidupkan atau mematikan penggulungan motor elektrik M.
Geganti terma KK1 dan KK2, elemen pemanasan yang ditunjukkan dalam litar kuasa, direka untuk melindungi motor elektrik daripada beban lampau yang berpanjangan:
Skim kawalan berfungsi seperti berikut. Apabila anda menekan butang mula SB1, gegelung pemula magnet KM ditenagakan dan oleh itu sesentuh litar bekalan KM ditutup dan arus elektrik memasuki belitan motor. Pemutar motor diputar dan dram mula bergerak ke hadapan. Pada masa yang sama, ia bergerak menjauhi tuil suis had SQ dan sesentuhnya ditutup.
Apabila butang mula SB1 dilepaskan dan sesentuhnya terbuka, gegelung KM pemula magnet akan menerima kuasa melalui sesentuh suis had SQ.Selepas bergerak ke hadapan, dan kemudian ke belakang, omboh akan menekan tuil suis had SQ, sesentuhnya akan terbuka dan gegelung KM akan mati. Ini akan menyebabkan sesentuh KM dalam litar kuasa membuka dan menghentikan motor elektrik.
Litar yang dipertimbangkan mengandungi litar kuasa dan kawalan. Pada masa hadapan, hanya skim kawalan akan dipertimbangkan.
Mengikut fungsi, i.e. mengikut tujuan, semua elemen yang terlibat dalam pengendalian litar boleh dibahagikan kepada tiga kumpulan: sesentuh kawalan, elemen perantaraan dan elemen eksekutif.
Kenalan kawalan ialah elemen yang dengannya arahan dikeluarkan (butang kawalan, suis, suis had, penukar utama, kenalan geganti, dsb.).
Nama elemen pertengahan menunjukkan bahawa mereka menduduki kedudukan pertengahan antara elemen kawalan dan eksekutif. Dalam litar geganti-sentuh, ia termasuk geganti masa dan geganti perantaraan, dan dalam litar bukan hubungan — gerbang logik.
Elemen eksekutif ialah mekanisme eksekutif. Walau bagaimanapun, apabila membangunkan litar kawalan, mekanisme pemacu itu sendiri (motor elektrik atau elemen pemanasan) tidak digunakan, tetapi peranti yang merangkuminya, i.e. pemula magnet, penyentuh, dsb.
Semua kenalan kawalan, mengikut prinsip fungsinya, dibahagikan kepada lima jenis: mulakan hubungan dengan tindakan pendek (PC), mulakan hubungan dengan tindakan panjang (PD), hentikan sentuhan dengan tindakan pendek (OK), hentikan sentuhan dengan tindakan panjang (OD). ), kenalan mula-henti (perisian). Kenalan ini dipanggil yang utama.
Siklogram operasi semua kenalan biasa dalam kawalan mekanisme kitaran ditunjukkan dalam rajah. 2.
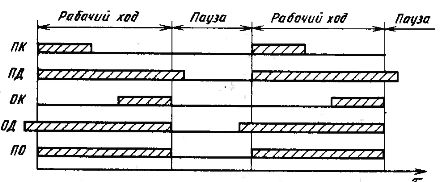
nasi. 2.Siklogram kenalan kawalan
Setiap daripada lima kenalan mula berfungsi (menutup) dan tamat (membuka) pada saat tertentu dalam masa. Jadi, kenalan mula memulakan kerja mereka bersama-sama dengan permulaan strok kerja, tetapi kenalan YAK berhenti berfungsi semasa strok bekerja, OD — semasa jeda, iaitu, mereka berbeza antara satu sama lain hanya pada saat-saat dimatikan ( pembukaan).
Menghentikan kenalan, yang, tidak seperti memulakan kenalan, berhenti bekerja pada masa yang sama dengan penghujung strok kerja, berbeza pada saat-saat kemasukan (penutupan). Stop contact OK memulakan operasinya semasa strok bekerja, dan contact OD - semasa jeda. Hanya kenalan perisian yang memulakan kerjanya bersama-sama dengan permulaan kursus kerja dan berakhir dengan penghujungnya.
Dengan bantuan lima kenalan utama yang dipertimbangkan, adalah mungkin untuk mendapatkan empat skim untuk mengawal elemen eksekutif dan perantaraan, yang dipanggil skim tipikal (Rajah 3).

nasi. 3. Skim kawalan biasa untuk litar eksekutif dan perantaraan
Litar tipikal pertama (Rajah 3, a) hanya mempunyai satu hubungan kawalan perisian. Jika ia ditutup, maka arus elektrik mengalir melalui penggerak X, dan jika ia terbuka, tiada arus mengalir. Kenalan PO mempunyai makna tersendiri dan semua kenalan lain mesti digunakan secara berpasangan (mula dan berhenti).
Litar tipikal kedua mempunyai dua sesentuh kawalan dengan tindakan berterusan: PD dan OD (Rajah 3, b).
Litar tipikal ketiga terdiri daripada sesentuh mula komputer dan sesentuh henti OD, sebagai tambahan kepada sesentuh kawalan, litar ini harus termasuk sesentuh penyekat x, yang melaluinya penggerak X akan terus menerima kuasa selepas sesentuh mula. komputer dibuka (Rajah 3, c).
Skim tipikal keempat adalah berdasarkan dua kenalan jangka pendek: mulakan komputer dan hentikan OK, disambung secara selari (Rajah 3, d).
Empat skema tipikal yang diberikan membenarkan (seolah-olah dari kiub) untuk menyusun skema siri selari yang kompleks untuk mengawal kenalan. Jadi, sebagai contoh, skim kawalan tuil yang sedang dipertimbangkan (lihat Rajah 1) adalah berdasarkan skema tipikal keempat. Ia menggunakan butang tekan SB1 sebagai hubungan mula jangka pendek dan suis had SQ sebagai kenalan henti jangka pendek.
Apabila membuat skema kawalan menggunakan kaedah intuitif, adalah perlu untuk menentukan dengan betul jenis hubungan kawalan, iaitu, tempoh tindakannya.
Pertimbangkan contoh membangunkan skim kawalan menggunakan kaedah intuitif menggunakan skema biasa.
Biarkan perlu untuk membangunkan peranti separa automatik untuk mengawal induktor dan peranti untuk menyembur pemasangan yang direka untuk memanaskan produk dengan arus frekuensi tinggi dan kemudian menyejukkannya dengan pancutan air. Masa pemanasan produk dalam induktor ialah 12 s dan masa penyejukan ialah 8 jam. Produk dipasang secara manual di dalam induktor.
Pertama, kami akan menganalisis operasi peranti separa automatik dan menentukan semua elemen eksekutif dan perantaraan. Pekerja memasang produk secara manual ke dalam induktor dan menekan butang mula.Pada ketika ini, induktor dihidupkan dan pemanasan produk bermula. Pada masa yang sama, geganti masa juga harus dihidupkan, dengan mengambil kira masa pemanasan (12 s).
Relay kali ini (lebih tepat, kenalannya) mematikan induktor dan menghidupkan pemercik, yang membekalkan air untuk penyejukan. Pada masa yang sama, geganti kedua mesti dihidupkan untuk mengira detik masa penyejukan, iaitu, untuk mematikan penyembur. Dengan cara ini, adalah perlu untuk mengawal empat elemen: induktor, peranti semburan dan dua geganti masa.
Induktor dihidupkan dan dimatikan melalui kontaktor, itulah sebabnya ia perlu untuk mengawal yang terakhir. Penyembur dikawal oleh injap solenoid.
Mari kita tentukan gegelung (gegelung) penyentuh KM1, gegelung injap solenoid KM2 dan gegelung geganti masa KT1 dan K.T2, masing-masing. Oleh itu, kami mempunyai dua penggerak: KM1 dan KM2 dan dua elemen perantaraan: KT1 dan KT2.
Daripada analisis yang dijalankan, berikutan pemanasan perlu dimulakan dahulu, iaitu gegelung KM1 akan teruja. Butang pencetus SB (tindakan pendek) digunakan sebagai kenalan mula. Oleh itu, sama ada skim tipikal ketiga atau keempat adalah terpakai.
Biarkan induktor diputuskan daripada kenalan geganti masa KT1.1, yang dalam kes ini adalah kenalan bertindak panjang. Oleh itu, kami memilih skim tipikal ketiga. Pada masa yang sama dengan penggulungan pemula magnet KM1, adalah perlu untuk menghidupkan geganti masa KT1, yang sangat mudah dilakukan dengan menyambungkannya secara selari.
Pertimbangkan pengendalian litar yang terhasil (Rajah 4, a).
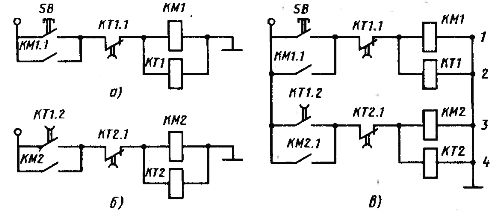
nasi. 4.Litar kawalan: a — induktor dan geganti untuk masa pemanasan, b — peranti pemercik dan masa penyejukan geganti, c — pemasangan secara keseluruhan
Apabila anda menekan butang mula SB, gegelung penyentuh KM1 bertenaga, iaitu, pemanasan produk bermula. Pada masa yang sama, gegelung geganti masa KT1 ditenagakan dan mula mengira detik masa pemanasan. Dengan bantuan sesentuh penyekat KM1.1, voltan gegelung KM1 akan dikekalkan walaupun selepas melepaskan butang pencetus SB, i.e. selepas membuka kenalannya.
Selepas masa pemanasan telah tamat, geganti masa KT1 akan berfungsi, kenalannya KT1.1 akan dibuka. Ini akan menyebabkan gegelung KM1 mati (pemanasan produk akan tamat). Penyembur kini harus dihidupkan. Ia boleh dihidupkan oleh geganti masa KT1 dengan menutup kenalan. Apabila penyembur dihidupkan, geganti masa KT1 dimatikan. Oleh itu, hubungan penutup KT1.1 akan menjadi hubungan jangka pendek. Oleh itu, kami akan menggunakan skema tipikal ketiga sekali lagi.
Pada masa yang sama dengan penyembur, adalah perlu untuk menghidupkan geganti masa KT2, yang mengira masa penyejukan. Untuk tujuan ini, kami akan menggunakan teknik yang digunakan dan menyambungkan gegelung geganti masa KT2 selari dengan gegelung KM2. Oleh itu kita mendapat skim kawalan kedua (Rajah 4, b). Menggabungkan dua litar (Rajah 4, a dan b), kami mendapat skema kawalan umum (Rajah 4, c).
Sekarang mari kita pertimbangkan pengendalian litar secara keseluruhan (Rajah 4, c). Apabila anda menekan butang mula SB, gegelung penyentuh KM1 dan geganti masa KT1 ditenagakan dan produk mula menjadi panas.Selepas 12 s, geganti masa KT1 akan beroperasi dan sesentuhnya dalam litar 1 akan terbuka dan dalam litar 2 akan ditutup. Produk akan mula sejuk. Serentak dengan gegelung KM2 injap solenoid, geganti masa K akan ditenagakan T2, mengira detik masa penyejukan. Apabila sesentuh KT2.1 (litar 3) dibuka, injap KM2 dan geganti masa KT2 dimatikan, dan litar kembali ke kedudukan asalnya .
Skim kawalan induktor dan pemercik yang dihasilkan telah dibangunkan menggunakan kaedah intuitif. Walau bagaimanapun, tiada bukti bahawa skim ini akan betul dan optimum. Persoalan kebolehkendalian litar boleh diselesaikan hanya selepas pengeluarannya dan pengesahan eksperimen yang teliti. Ini adalah kelemahan terbesar kaedah intuitif. Kelemahan yang dinyatakan tidak terdapat dalam kaedah analisis. Kaedah analisis untuk membangunkan skim kawalan akan dibincangkan dalam artikel seterusnya.